rtabmap
 rtabmap copied to clipboard
rtabmap copied to clipboard
Rtabmap launch error while I used a D435 RGB-D camera.
Hello sir.
Now I am using an rgbd camera which proves from realsense (d435).
I wanna do the rgb-d slam only using a d435 sensor.
I was successful to build and install rtabmap source build but my launch file give me errors when I run my launch file setup.
would you help me?
realsense launch file
<launch>
<arg name="serial_no" default=""/>
<arg name="json_file_path" default=""/>
<arg name="camera" default="camera"/>
<arg name="tf_prefix" default="$(arg camera)"/>
<arg name="external_manager" default="false"/>
<arg name="manager" default="realsense2_camera_manager"/>
<arg name="fisheye_width" default="640"/>
<arg name="fisheye_height" default="480"/>
<arg name="enable_fisheye" default="false"/>
<arg name="depth_width" default="640"/>
<arg name="depth_height" default="480"/>
<arg name="enable_depth" default="true"/>
<arg name="infra_width" default="640"/>
<arg name="infra_height" default="480"/>
<arg name="enable_infra1" default="true"/>
<arg name="enable_infra2" default="true"/>
<arg name="color_width" default="848"/>
<arg name="color_height" default="480"/>
<arg name="enable_color" default="true"/>
<arg name="fisheye_fps" default="30"/>
<arg name="depth_fps" default="30"/>
<arg name="infra_fps" default="30"/>
<arg name="color_fps" default="30"/>
<arg name="gyro_fps" default="400"/>
<arg name="accel_fps" default="250"/>
<arg name="enable_gyro" default="true"/>
<arg name="enable_accel" default="true"/>
<arg name="enable_pointcloud" default="true"/>
<arg name="pointcloud_texture_stream" default="RS2_STREAM_COLOR"/>
<arg name="pointcloud_texture_index" default="0"/>
<arg name="enable_sync" default="false"/>
<arg name="align_depth" default="true"/>
<arg name="filters" default="pointcloud"/>
<arg name="clip_distance" default="-2"/>
<arg name="linear_accel_cov" default="0.01"/>
<arg name="initial_reset" default="false"/>
<arg name="reconnect_timeout" default="6.0"/>
<arg name="unite_imu_method" default=""/>
<arg name="topic_odom_in" default="odom_in"/>
<arg name="calib_odom_file" default=""/>
<arg name="publish_odom_tf" default="true"/>
<arg name="allow_no_texture_points" default="false"/>
<group ns="$(arg camera)">
<include file="$(find realsense2_camera)/launch/includes/nodelet.launch.xml">
<arg name="tf_prefix" value="$(arg tf_prefix)"/>
<arg name="external_manager" value="$(arg external_manager)"/>
<arg name="manager" value="$(arg manager)"/>
<arg name="serial_no" value="$(arg serial_no)"/>
<arg name="json_file_path" value="$(arg json_file_path)"/>
<arg name="enable_pointcloud" value="$(arg enable_pointcloud)"/>
<arg name="pointcloud_texture_stream" value="$(arg pointcloud_texture_stream)"/>
<arg name="pointcloud_texture_index" value="$(arg pointcloud_texture_index)"/>
<arg name="enable_sync" value="$(arg enable_sync)"/>
<arg name="align_depth" value="$(arg align_depth)"/>
<arg name="fisheye_width" value="$(arg fisheye_width)"/>
<arg name="fisheye_height" value="$(arg fisheye_height)"/>
<arg name="enable_fisheye" value="$(arg enable_fisheye)"/>
<arg name="depth_width" value="$(arg depth_width)"/>
<arg name="depth_height" value="$(arg depth_height)"/>
<arg name="enable_depth" value="$(arg enable_depth)"/>
<arg name="color_width" value="$(arg color_width)"/>
<arg name="color_height" value="$(arg color_height)"/>
<arg name="enable_color" value="$(arg enable_color)"/>
<arg name="infra_width" value="$(arg infra_width)"/>
<arg name="infra_height" value="$(arg infra_height)"/>
<arg name="enable_infra1" value="$(arg enable_infra1)"/>
<arg name="enable_infra2" value="$(arg enable_infra2)"/>
<arg name="fisheye_fps" value="$(arg fisheye_fps)"/>
<arg name="depth_fps" value="$(arg depth_fps)"/>
<arg name="infra_fps" value="$(arg infra_fps)"/>
<arg name="color_fps" value="$(arg color_fps)"/>
<arg name="gyro_fps" value="$(arg gyro_fps)"/>
<arg name="accel_fps" value="$(arg accel_fps)"/>
<arg name="enable_gyro" value="$(arg enable_gyro)"/>
<arg name="enable_accel" value="$(arg enable_accel)"/>
<arg name="filters" value="$(arg filters)"/>
<arg name="clip_distance" value="$(arg clip_distance)"/>
<arg name="linear_accel_cov" value="$(arg linear_accel_cov)"/>
<arg name="initial_reset" value="$(arg initial_reset)"/>
<arg name="reconnect_timeout" value="$(arg reconnect_timeout)"/>
<arg name="unite_imu_method" value="$(arg unite_imu_method)"/>
<arg name="topic_odom_in" value="$(arg topic_odom_in)"/>
<arg name="calib_odom_file" value="$(arg calib_odom_file)"/>
<arg name="publish_odom_tf" value="$(arg publish_odom_tf)"/>
<arg name="allow_no_texture_points" value="$(arg allow_no_texture_points)"/>
</include>
</group>
<!-- Loads the camera model -->
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find realsense2_description)/urdf/test_d435_camera.urdf.xacro' use_nominal_extrinsics:=false"/>
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher"/>
</launch>
command for running realsence camera
roslaunch realsense2_camera d435_camera.launch align_depth:=true
realsense topics
/camera/align_to_color/parameter_descriptions
/camera/align_to_color/parameter_updates
/camera/aligned_depth_to_color/camera_info
/camera/aligned_depth_to_color/image_raw
/camera/aligned_depth_to_color/image_raw/compressed
/camera/aligned_depth_to_color/image_raw/compressed/parameter_descriptions
/camera/aligned_depth_to_color/image_raw/compressed/parameter_updates
/camera/aligned_depth_to_color/image_raw/compressedDepth
/camera/aligned_depth_to_color/image_raw/compressedDepth/parameter_descriptions
/camera/aligned_depth_to_color/image_raw/compressedDepth/parameter_updates
/camera/aligned_depth_to_color/image_raw/theora
/camera/aligned_depth_to_color/image_raw/theora/parameter_descriptions
/camera/aligned_depth_to_color/image_raw/theora/parameter_updates
/camera/color/camera_info
/camera/color/image_raw
/camera/color/image_raw/compressed
/camera/color/image_raw/compressed/parameter_descriptions
/camera/color/image_raw/compressed/parameter_updates
/camera/color/image_raw/compressedDepth
/camera/color/image_raw/compressedDepth/parameter_descriptions
/camera/color/image_raw/compressedDepth/parameter_updates
/camera/color/image_raw/theora
/camera/color/image_raw/theora/parameter_descriptions
/camera/color/image_raw/theora/parameter_updates
/camera/color/metadata
/camera/depth/camera_info
/camera/depth/color/points
/camera/depth/image_rect_raw
/camera/depth/image_rect_raw/compressed
/camera/depth/image_rect_raw/compressed/parameter_descriptions
/camera/depth/image_rect_raw/compressed/parameter_updates
/camera/depth/image_rect_raw/compressedDepth
/camera/depth/image_rect_raw/compressedDepth/parameter_descriptions
/camera/depth/image_rect_raw/compressedDepth/parameter_updates
/camera/depth/image_rect_raw/theora
/camera/depth/image_rect_raw/theora/parameter_descriptions
/camera/depth/image_rect_raw/theora/parameter_updates
/camera/depth/metadata
/camera/extrinsics/depth_to_color
/camera/extrinsics/depth_to_infra1
/camera/extrinsics/depth_to_infra2
/camera/infra1/camera_info
/camera/infra1/image_rect_raw
/camera/infra1/image_rect_raw/compressed
/camera/infra1/image_rect_raw/compressed/parameter_descriptions
/camera/infra1/image_rect_raw/compressed/parameter_updates
/camera/infra1/image_rect_raw/compressedDepth
/camera/infra1/image_rect_raw/compressedDepth/parameter_descriptions
/camera/infra1/image_rect_raw/compressedDepth/parameter_updates
/camera/infra1/image_rect_raw/theora
/camera/infra1/image_rect_raw/theora/parameter_descriptions
/camera/infra1/image_rect_raw/theora/parameter_updates
/camera/infra1/metadata
/camera/infra2/camera_info
/camera/infra2/image_rect_raw
/camera/infra2/image_rect_raw/compressed
/camera/infra2/image_rect_raw/compressed/parameter_descriptions
/camera/infra2/image_rect_raw/compressed/parameter_updates
/camera/infra2/image_rect_raw/compressedDepth
/camera/infra2/image_rect_raw/compressedDepth/parameter_descriptions
/camera/infra2/image_rect_raw/compressedDepth/parameter_updates
/camera/infra2/image_rect_raw/theora
/camera/infra2/image_rect_raw/theora/parameter_descriptions
/camera/infra2/image_rect_raw/theora/parameter_updates
/camera/infra2/metadata
/camera/pointcloud/parameter_descriptions
/camera/pointcloud/parameter_updates
/camera/realsense2_camera_manager/bond
/camera/rgb_camera/auto_exposure_roi/parameter_descriptions
/camera/rgb_camera/auto_exposure_roi/parameter_updates
/camera/rgb_camera/parameter_descriptions
/camera/rgb_camera/parameter_updates
/camera/stereo_module/auto_exposure_roi/parameter_descriptions
/camera/stereo_module/auto_exposure_roi/parameter_updates
/camera/stereo_module/parameter_descriptions
/camera/stereo_module/parameter_updates
/diagnostics
/gps/fix
/imu/data
/joint_states
/rosout
/rosout_agg
/tag_detections
/tf
/tf_static
rtabmap launch file
command for running rtabmap
roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" \
depth_topic:=/camera/aligned_depth_to_color/image_raw \
rgb_topic:=/camera/color/image_raw \
camera_info_topic:=/camera/color/camera_info \
rtabmapviz"=true
But error shows like this every times...
[ INFO] [1644480156.899977209]: Odom: quality=572, std dev=0.002634m|0.038960rad, update time=0.052625s
[rtabmap/rtabmap-2] process has died [pid 4640, exit code -11, cmd /home/a/SLAM/rtabmap_ws/devel/lib/rtabmap_ros/rtabmap --delete_db_on_start rgb/image:=/camera/color/image_raw depth/image:=/camera/aligned_depth_to_color/image_raw rgb/camera_info:=/camera/color/camera_info rgbd_image:=rgbd_image_relay left/image_rect:=/stereo_camera/left/image_rect_color right/image_rect:=/stereo_camera/right/image_rect left/camera_info:=/stereo_camera/left/camera_info right/camera_info:=/stereo_camera/right/camera_info scan:=/scan scan_cloud:=/scan_cloud scan_descriptor:=/scan_descriptor user_data:=/user_data user_data_async:=/user_data_async gps/fix:=/gps/fix tag_detections:=/tag_detections fiducial_transforms:=/fiducial_transforms odom:=odom imu:=/imu/data __name:=rtabmap __log:=/home/a/.ros/log/b668012a-8a47-11ec-8c7b-94e70ba1e85c/rtabmap-rtabmap-2.log].
log file: /home/a/.ros/log/b668012a-8a47-11ec-8c7b-94e70ba1e85c/rtabmap-rtabmap-2*.log
[ INFO] [1644480156.949829391]: Odom: quality=565, std dev=0.000789m|0.027549rad, update time=0.048894s
[ INFO] [1644480157.004606450]: Odom: quality=544, std dev=0.001502m|0.043116rad, update time=0.053827s
I think that some processes from rtabmap were dead... but I can't figure out which processes are dead..
and I don't know why it was dead.
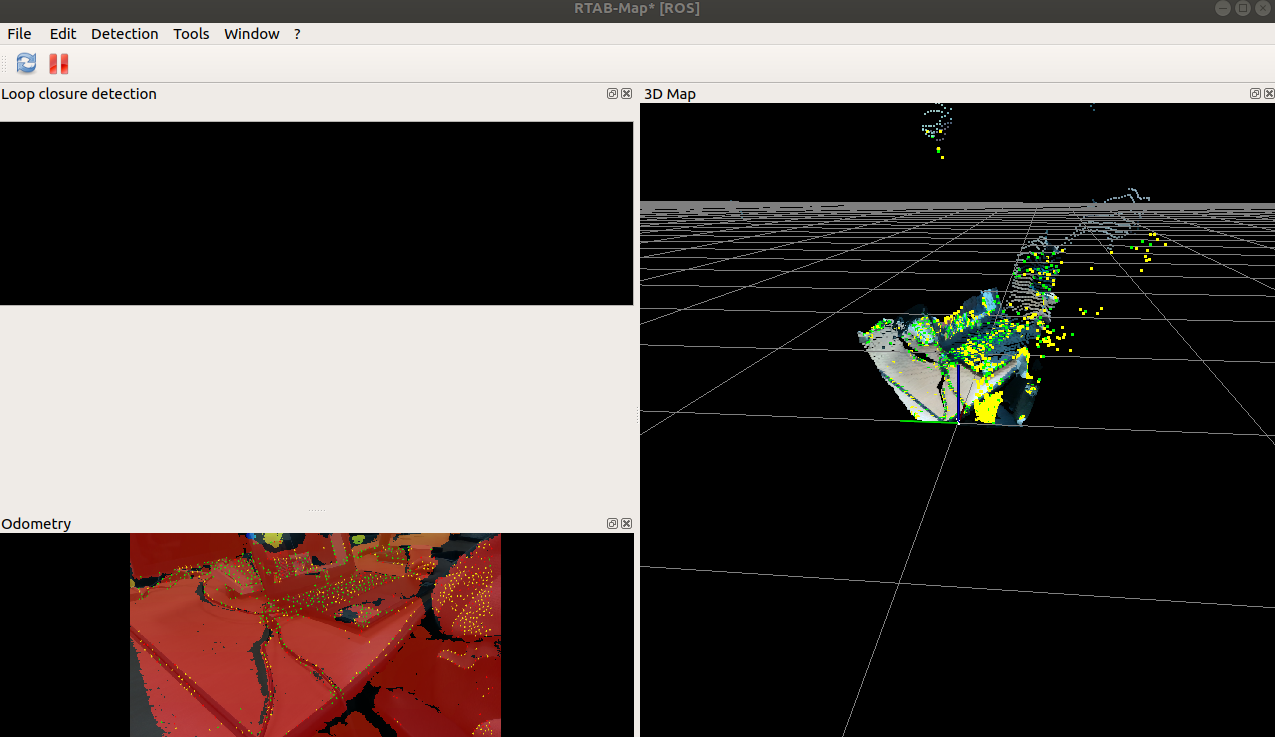
I think odometry parts are alive but mapping and loop closure part looks dead
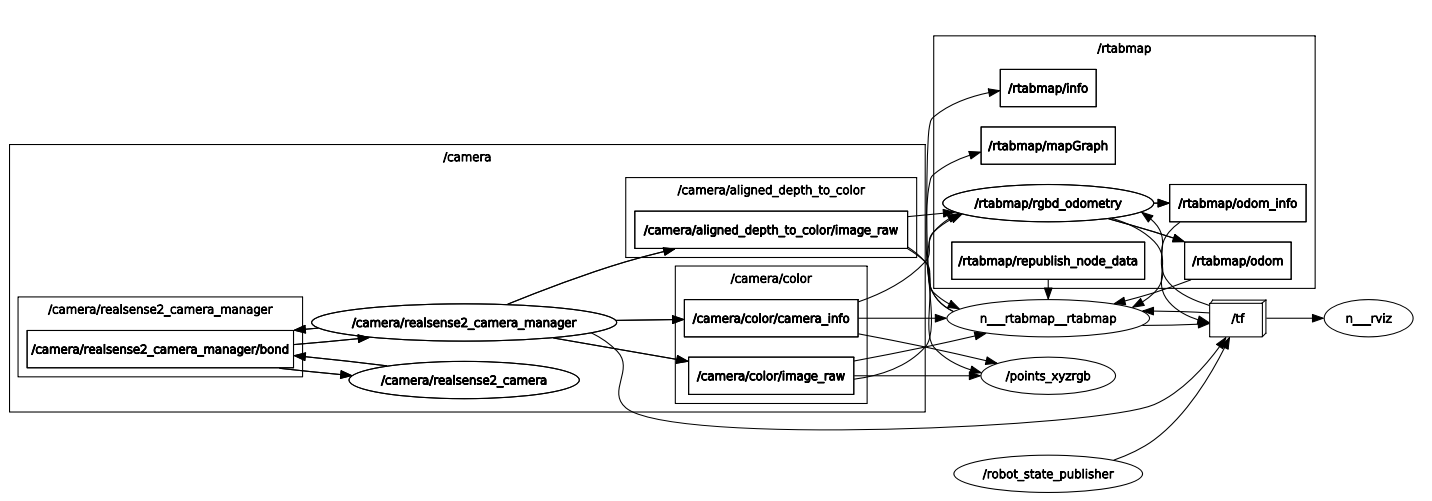
Rviz does not show anything but rtabmapvis shows about odometry only
-------------------------this is full screen when I run rtabmap_ros rtabmap.launch
roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" depth_topic:=/camera/aligned_depth_to_color/image_raw rgb_topic:=/camera/color/image_raw camera_info_topic:=/camera/color/camera_info rtabmapviz:=true
... logging to /home/a/.ros/log/b668012a-8a47-11ec-8c7b-94e70ba1e85c/roslaunch-a-6854.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://a:43477/
SUMMARY
========
CLEAR PARAMETERS
* /points_xyzrgb/
* /rtabmap/rgbd_odometry/
* /rtabmap/rtabmap/
* /rtabmap/rtabmapviz/
PARAMETERS
* /points_xyzrgb/approx_sync: True
* /points_xyzrgb/decimation: 4.0
* /points_xyzrgb/voxel_size: 0.0
* /rosdistro: melodic
* /rosversion: 1.14.12
* /rtabmap/rgbd_odometry/approx_sync: True
* /rtabmap/rgbd_odometry/config_path:
* /rtabmap/rgbd_odometry/expected_update_rate: 0.0
* /rtabmap/rgbd_odometry/frame_id: base_link
* /rtabmap/rgbd_odometry/ground_truth_base_frame_id:
* /rtabmap/rgbd_odometry/ground_truth_frame_id:
* /rtabmap/rgbd_odometry/guess_frame_id:
* /rtabmap/rgbd_odometry/guess_min_rotation: 0.0
* /rtabmap/rgbd_odometry/guess_min_translation: 0.0
* /rtabmap/rgbd_odometry/keep_color: False
* /rtabmap/rgbd_odometry/max_update_rate: 0.0
* /rtabmap/rgbd_odometry/odom_frame_id: odom
* /rtabmap/rgbd_odometry/publish_tf: True
* /rtabmap/rgbd_odometry/queue_size: 10
* /rtabmap/rgbd_odometry/subscribe_rgbd: False
* /rtabmap/rgbd_odometry/wait_for_transform_duration: 0.2
* /rtabmap/rgbd_odometry/wait_imu_to_init: False
* /rtabmap/rtabmap/Mem/IncrementalMemory: true
* /rtabmap/rtabmap/Mem/InitWMWithAllNodes: false
* /rtabmap/rtabmap/approx_sync: True
* /rtabmap/rtabmap/config_path:
* /rtabmap/rtabmap/database_path: ~/.ros/rtabmap.db
* /rtabmap/rtabmap/frame_id: base_link
* /rtabmap/rtabmap/gen_depth: False
* /rtabmap/rtabmap/gen_depth_decimation: 1
* /rtabmap/rtabmap/gen_depth_fill_holes_error: 0.1
* /rtabmap/rtabmap/gen_depth_fill_holes_size: 0
* /rtabmap/rtabmap/gen_depth_fill_iterations: 1
* /rtabmap/rtabmap/gen_scan: False
* /rtabmap/rtabmap/ground_truth_base_frame_id:
* /rtabmap/rtabmap/ground_truth_frame_id:
* /rtabmap/rtabmap/landmark_angular_variance: 9999.0
* /rtabmap/rtabmap/landmark_linear_variance: 0.0001
* /rtabmap/rtabmap/map_frame_id: map
* /rtabmap/rtabmap/odom_frame_id:
* /rtabmap/rtabmap/odom_frame_id_init:
* /rtabmap/rtabmap/odom_sensor_sync: False
* /rtabmap/rtabmap/odom_tf_angular_variance: 0.001
* /rtabmap/rtabmap/odom_tf_linear_variance: 0.001
* /rtabmap/rtabmap/publish_tf: True
* /rtabmap/rtabmap/queue_size: 10
* /rtabmap/rtabmap/scan_cloud_max_points: 0
* /rtabmap/rtabmap/subscribe_depth: True
* /rtabmap/rtabmap/subscribe_odom_info: True
* /rtabmap/rtabmap/subscribe_rgb: True
* /rtabmap/rtabmap/subscribe_rgbd: False
* /rtabmap/rtabmap/subscribe_scan: False
* /rtabmap/rtabmap/subscribe_scan_cloud: False
* /rtabmap/rtabmap/subscribe_scan_descriptor: False
* /rtabmap/rtabmap/subscribe_stereo: False
* /rtabmap/rtabmap/subscribe_user_data: False
* /rtabmap/rtabmap/wait_for_transform_duration: 0.2
* /rtabmap/rtabmapviz/approx_sync: True
* /rtabmap/rtabmapviz/frame_id: base_link
* /rtabmap/rtabmapviz/odom_frame_id:
* /rtabmap/rtabmapviz/queue_size: 10
* /rtabmap/rtabmapviz/subscribe_depth: True
* /rtabmap/rtabmapviz/subscribe_odom_info: True
* /rtabmap/rtabmapviz/subscribe_rgb: True
* /rtabmap/rtabmapviz/subscribe_rgbd: False
* /rtabmap/rtabmapviz/subscribe_scan: False
* /rtabmap/rtabmapviz/subscribe_scan_cloud: False
* /rtabmap/rtabmapviz/subscribe_scan_descriptor: False
* /rtabmap/rtabmapviz/subscribe_stereo: False
* /rtabmap/rtabmapviz/wait_for_transform_duration: 0.2
NODES
/
points_xyzrgb (nodelet/nodelet)
rviz (rviz/rviz)
/rtabmap/
rgbd_odometry (rtabmap_ros/rgbd_odometry)
rtabmap (rtabmap_ros/rtabmap)
rtabmapviz (rtabmap_ros/rtabmapviz)
ROS_MASTER_URI=http://localhost:11311
process[rtabmap/rgbd_odometry-1]: started with pid [6882]
process[rtabmap/rtabmap-2]: started with pid [6883]
process[rtabmap/rtabmapviz-3]: started with pid [6884]
process[rviz-4]: started with pid [6885]
process[points_xyzrgb-5]: started with pid [6886]
type is rtabmap_ros/point_cloud_xyzrgb
[ INFO] [1644481214.298803644]: Starting node...
[ INFO] [1644481214.323289221]: Initializing nodelet with 12 worker threads.
[ INFO] [1644481214.335866259]: Initializing nodelet with 12 worker threads.
[ INFO] [1644481214.464532822]: Starting node...
[ INFO] [1644481214.469163740]: Odometry: frame_id = base_link
[ INFO] [1644481214.469213057]: Odometry: odom_frame_id = odom
[ INFO] [1644481214.469238572]: Odometry: publish_tf = true
[ INFO] [1644481214.469254810]: Odometry: wait_for_transform = true
[ INFO] [1644481214.469278852]: Odometry: wait_for_transform_duration = 0.200000
[ INFO] [1644481214.469318936]: Odometry: initial_pose = xyz=0.000000,0.000000,0.000000 rpy=0.000000,-0.000000,0.000000
[ INFO] [1644481214.469337687]: Odometry: ground_truth_frame_id =
[ INFO] [1644481214.469353563]: Odometry: ground_truth_base_frame_id =
[ INFO] [1644481214.469369815]: Odometry: config_path =
[ INFO] [1644481214.469386594]: Odometry: publish_null_when_lost = true
[ INFO] [1644481214.469402724]: Odometry: guess_frame_id =
[ INFO] [1644481214.469418942]: Odometry: guess_min_translation = 0.000000
[ INFO] [1644481214.469435377]: Odometry: guess_min_rotation = 0.000000
[ INFO] [1644481214.469451768]: Odometry: guess_min_time = 0.000000
[ INFO] [1644481214.469468219]: Odometry: expected_update_rate = 0.000000 Hz
[ INFO] [1644481214.469484065]: Odometry: max_update_rate = 0.000000 Hz
[ INFO] [1644481214.469499891]: Odometry: wait_imu_to_init = false
[ INFO] [1644481214.469530269]: Odometry: stereoParams_=0 visParams_=1 icpParams_=0
[ INFO] [1644481214.521481241]: Approximate time sync = true
[ INFO] [1644481214.584820903]: /rtabmap/rtabmap(maps): map_filter_radius = 0.000000
[ INFO] [1644481214.584850004]: /rtabmap/rtabmap(maps): map_filter_angle = 30.000000
[ INFO] [1644481214.584867131]: /rtabmap/rtabmap(maps): map_cleanup = true
[ INFO] [1644481214.584895085]: /rtabmap/rtabmap(maps): map_always_update = false
[ INFO] [1644481214.584910748]: /rtabmap/rtabmap(maps): map_empty_ray_tracing = true
[ INFO] [1644481214.584927886]: /rtabmap/rtabmap(maps): cloud_output_voxelized = true
[ INFO] [1644481214.584943439]: /rtabmap/rtabmap(maps): cloud_subtract_filtering = false
[ INFO] [1644481214.584959339]: /rtabmap/rtabmap(maps): cloud_subtract_filtering_min_neighbors = 2
[ INFO] [1644481214.585467973]: /rtabmap/rtabmap(maps): octomap_tree_depth = 16
[ INFO] [1644481214.620252981]: rtabmapviz: Using configuration from "/home/a/.ros/rtabmap_gui.ini"
[ INFO] [1644481214.625696084]: rtabmap: frame_id = base_link
[ INFO] [1644481214.625723281]: rtabmap: map_frame_id = map
[ INFO] [1644481214.625734420]: rtabmap: use_action_for_goal = false
[ INFO] [1644481214.625748110]: rtabmap: tf_delay = 0.050000
[ INFO] [1644481214.625758484]: rtabmap: tf_tolerance = 0.100000
[ INFO] [1644481214.625769115]: rtabmap: odom_sensor_sync = false
[ INFO] [1644481214.626396856]: rtabmap: gen_scan = false
[ INFO] [1644481214.626414877]: rtabmap: gen_depth = false
[ INFO] [1644481214.877307316]: Setting RTAB-Map parameter "Mem/IncrementalMemory"="true"
[ INFO] [1644481214.877732240]: Setting RTAB-Map parameter "Mem/InitWMWithAllNodes"="false"
[ INFO] [1644481215.029693740]: RGBDOdometry: approx_sync = true
[ INFO] [1644481215.029722905]: RGBDOdometry: queue_size = 10
[ INFO] [1644481215.029737878]: RGBDOdometry: subscribe_rgbd = false
[ INFO] [1644481215.029746908]: RGBDOdometry: rgbd_cameras = 1
[ INFO] [1644481215.029755212]: RGBDOdometry: keep_color = false
[ INFO] [1644481215.047242802]:
/rtabmap/rgbd_odometry subscribed to (approx sync):
/camera/color/image_raw \
/camera/aligned_depth_to_color/image_raw \
/camera/color/camera_info
[ INFO] [1644481215.201105642]: RTAB-Map detection rate = 1.000000 Hz
[ INFO] [1644481215.201732996]: rtabmap: Deleted database "/home/a/.ros/rtabmap.db" (--delete_db_on_start or -d are set).
[ INFO] [1644481215.201824384]: rtabmap: Using database from "/home/a/.ros/rtabmap.db" (0 MB).
[ INFO] [1644481215.287089663]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.036507s
[ INFO] [1644481215.314422587]: /rtabmap/rtabmap: subscribe_depth = true
[ INFO] [1644481215.314461124]: /rtabmap/rtabmap: subscribe_rgb = true
[ INFO] [1644481215.314477491]: /rtabmap/rtabmap: subscribe_stereo = false
[ INFO] [1644481215.314499345]: /rtabmap/rtabmap: subscribe_rgbd = false (rgbd_cameras=1)
[ INFO] [1644481215.314520349]: /rtabmap/rtabmap: subscribe_odom_info = true
[ INFO] [1644481215.314545022]: /rtabmap/rtabmap: subscribe_user_data = false
[ INFO] [1644481215.314568337]: /rtabmap/rtabmap: subscribe_scan = false
[ INFO] [1644481215.314590829]: /rtabmap/rtabmap: subscribe_scan_cloud = false
[ INFO] [1644481215.314612893]: /rtabmap/rtabmap: subscribe_scan_descriptor = false
[ INFO] [1644481215.314639585]: /rtabmap/rtabmap: queue_size = 10
[ INFO] [1644481215.314661116]: /rtabmap/rtabmap: approx_sync = true
[ INFO] [1644481215.314712598]: Setup depth callback
[ INFO] [1644481215.338119972]:
/rtabmap/rtabmap subscribed to (approx sync):
/rtabmap/odom \
/camera/color/image_raw \
/camera/aligned_depth_to_color/image_raw \
/camera/color/camera_info \
/rtabmap/odom_info
[ INFO] [1644481215.365929525]: Odom: quality=544, std dev=0.000786m|0.027549rad, update time=0.076256s
[ INFO] [1644481215.411118005]: Odom: quality=529, std dev=0.001156m|0.027549rad, update time=0.044226s
[ INFO] [1644481215.455058044]: Odom: quality=538, std dev=0.001130m|0.027549rad, update time=0.042906s
libpng warning: iCCP: known incorrect sRGB profile
libpng warning: iCCP: known incorrect sRGB profile
libpng warning: iCCP: known incorrect sRGB profile
[ INFO] [1644481215.467180426]: rtabmap 0.20.19 started...
[ INFO] [1644481215.500816888]: Odom: quality=543, std dev=0.001048m|0.027549rad, update time=0.044732s
[ INFO] [1644481215.541724122]: Odom: quality=536, std dev=0.001936m|0.046331rad, update time=0.039931s
[ INFO] [1644481215.596113044]: Odom: quality=534, std dev=0.001334m|0.036256rad, update time=0.053435s
[ INFO] [1644481215.630509193]: rtabmapviz: Reading parameters from the ROS server...
[ INFO] [1644481215.642312466]: Odom: quality=512, std dev=0.001016m|0.038960rad, update time=0.045208s
[ INFO] [1644481215.682385402]: Odom: quality=505, std dev=0.001099m|0.032761rad, update time=0.039198s
[ INFO] [1644481215.724262521]: Odom: quality=517, std dev=0.001632m|0.044810rad, update time=0.041046s
[ INFO] [1644481215.763929488]: Odom: quality=499, std dev=0.002166m|0.038960rad, update time=0.038849s
[rtabmap/rtabmap-2] process has died [pid 6883, exit code -11, cmd /home/a/SLAM/rtabmap_ws/devel/lib/rtabmap_ros/rtabmap --delete_db_on_start rgb/image:=/camera/color/image_raw depth/image:=/camera/aligned_depth_to_color/image_raw rgb/camera_info:=/camera/color/camera_info rgbd_image:=rgbd_image_relay left/image_rect:=/stereo_camera/left/image_rect_color right/image_rect:=/stereo_camera/right/image_rect left/camera_info:=/stereo_camera/left/camera_info right/camera_info:=/stereo_camera/right/camera_info scan:=/scan scan_cloud:=/scan_cloud scan_descriptor:=/scan_descriptor user_data:=/user_data user_data_async:=/user_data_async gps/fix:=/gps/fix tag_detections:=/tag_detections fiducial_transforms:=/fiducial_transforms odom:=odom imu:=/imu/data __name:=rtabmap __log:=/home/a/.ros/log/b668012a-8a47-11ec-8c7b-94e70ba1e85c/rtabmap-rtabmap-2.log].
log file: /home/a/.ros/log/b668012a-8a47-11ec-8c7b-94e70ba1e85c/rtabmap-rtabmap-2*.log
[ INFO] [1644481215.805320372]: Odom: quality=524, std dev=0.000960m|0.038960rad, update time=0.040497s
[ INFO] [1644481215.816180103]: rtabmapviz: Parameters read = 352
[ INFO] [1644481215.816210226]: rtabmapviz: Parameters successfully read.
[ INFO] [1644481215.847336888]: Odom: quality=511, std dev=0.001076m|0.027549rad, update time=0.041183s
[ INFO] [1644481215.891394339]: Odom: quality=518, std dev=0.001677m|0.043116rad, update time=0.043094s
[ INFO] [1644481215.929161710]: Odom: quality=491, std dev=0.001419m|0.044810rad, update time=0.036846s
[ INFO] [1644481215.971058466]: Odom: quality=508, std dev=0.001282m|0.032761rad, update time=0.040988s
[ INFO] [1644481216.010245429]: Odom: quality=534, std dev=0.002535m|0.041195rad, update time=0.038337s
[ INFO] [1644481216.052201005]: Odom: quality=502, std dev=0.002070m|0.041195rad, update time=0.041107s
[ INFO] [1644481216.090564796]: Odom: quality=507, std dev=0.001167m|0.000032rad, update time=0.037513s
[ INFO] [1644481216.130641177]: Odom: quality=517, std dev=0.001035m|0.027549rad, update time=0.039214s
[ INFO] [1644481216.169379908]: Odom: quality=498, std dev=0.001551m|0.036256rad, update time=0.037879s
[ INFO] [1644481216.173948880]: /rtabmap/rtabmapviz: subscribe_depth = true
[ INFO] [1644481216.173974795]: /rtabmap/rtabmapviz: subscribe_rgb = true
[ INFO] [1644481216.173983259]: /rtabmap/rtabmapviz: subscribe_stereo = false
[ INFO] [1644481216.173990941]: /rtabmap/rtabmapviz: subscribe_rgbd = false (rgbd_cameras=1)
[ INFO] [1644481216.174000633]: /rtabmap/rtabmapviz: subscribe_odom_info = true
[ INFO] [1644481216.174010244]: /rtabmap/rtabmapviz: subscribe_user_data = false
[ INFO] [1644481216.174018278]: /rtabmap/rtabmapviz: subscribe_scan = false
[ INFO] [1644481216.174027368]: /rtabmap/rtabmapviz: subscribe_scan_cloud = false
[ INFO] [1644481216.174036728]: /rtabmap/rtabmapviz: subscribe_scan_descriptor = false
[ INFO] [1644481216.174046443]: /rtabmap/rtabmapviz: queue_size = 10
[ INFO] [1644481216.174056333]: /rtabmap/rtabmapviz: approx_sync = true
[ INFO] [1644481216.174067446]: Setup depth callback
[ INFO] [1644481216.208293527]: Odom: quality=506, std dev=0.001370m|0.032761rad, update time=0.038086s
[ INFO] [1644481216.212008506]:
/rtabmap/rtabmapviz subscribed to (approx sync):
/rtabmap/odom \
/camera/color/image_raw \
/camera/aligned_depth_to_color/image_raw \
/camera/color/camera_info \
/rtabmap/odom_info
[ INFO] [1644481216.212083675]: rtabmapviz started.
[ INFO] [1644481216.249785639]: Odom: quality=522, std dev=0.001099m|0.036256rad, update time=0.040436s
[ INFO] [1644481216.289558987]: Odom: quality=521, std dev=0.001013m|0.027549rad, update time=0.038896s
I think I have some problem rtabmap source build.. because I was successful to run rtabmap with binary install.
but I wanna use rtabmab by source build... would you help me?
plz help me
best regards
Try step A (gdb backtrace) of this issue https://github.com/introlab/rtabmap_ros/issues/28, to see from where the seg fault happens.