FAST_LIO
 FAST_LIO copied to clipboard
FAST_LIO copied to clipboard
无人机设计图
您的工作真的太棒了 我在您的代码的基础上做了一点儿微小的工作,增加了GNSS校准功能,在大场景之下提高了鲁棒性,在进行评估之后会找您进行代码合并。 请问您有这个小型无人机的设计图纸和零件的购买链接么,我也想在进行UAV SLAM验证(ps.horizon特别适合放在无人机上,所以请问第二版什么时候上线哈哈哈
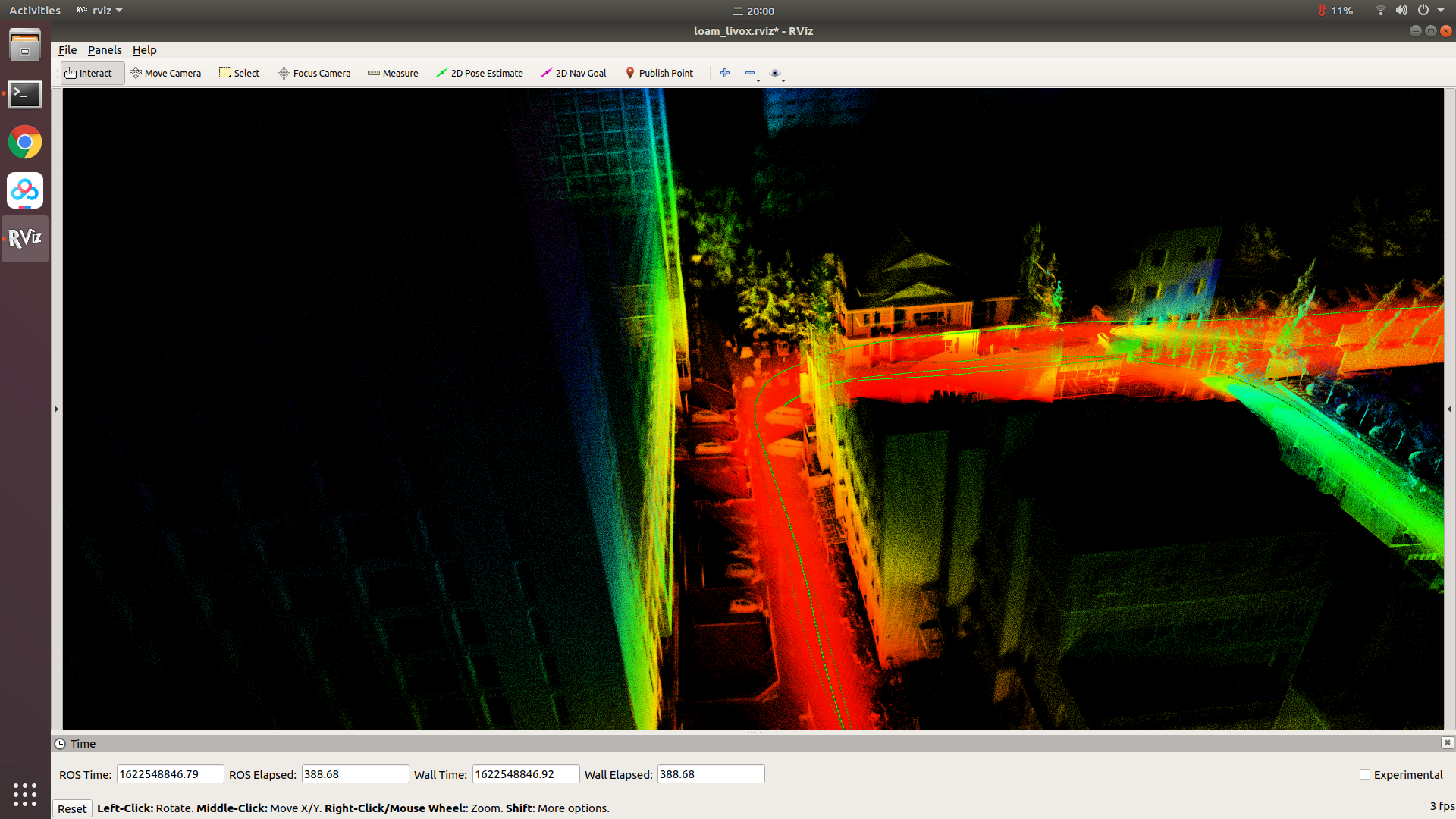
这个是我的一些效果:

https://user-images.githubusercontent.com/70955391/120224590-52710480-c276-11eb-8149-1eae8372397e.mp4
哈哈 你很厉害啊 我的horizon也装了这个程序 但是测试结果并没有你的好 原因大概是:我按照geoslam的作业方式进行采集,在路线中有多次停留,将设备放置在地面采集10秒以上的数据,想以此 作为像控点,来提高精度。这样做,估计与程序设定的闭合检查等数据迭代优化方式不符,所以最后闭合差很大! 如果是想在无人机上挂载horizon,可以参考openmms的方案,github上有他们实验小组的代码已经网址!期待你的新结果!同意也和你一样在期待FAST-LIO 2.0!
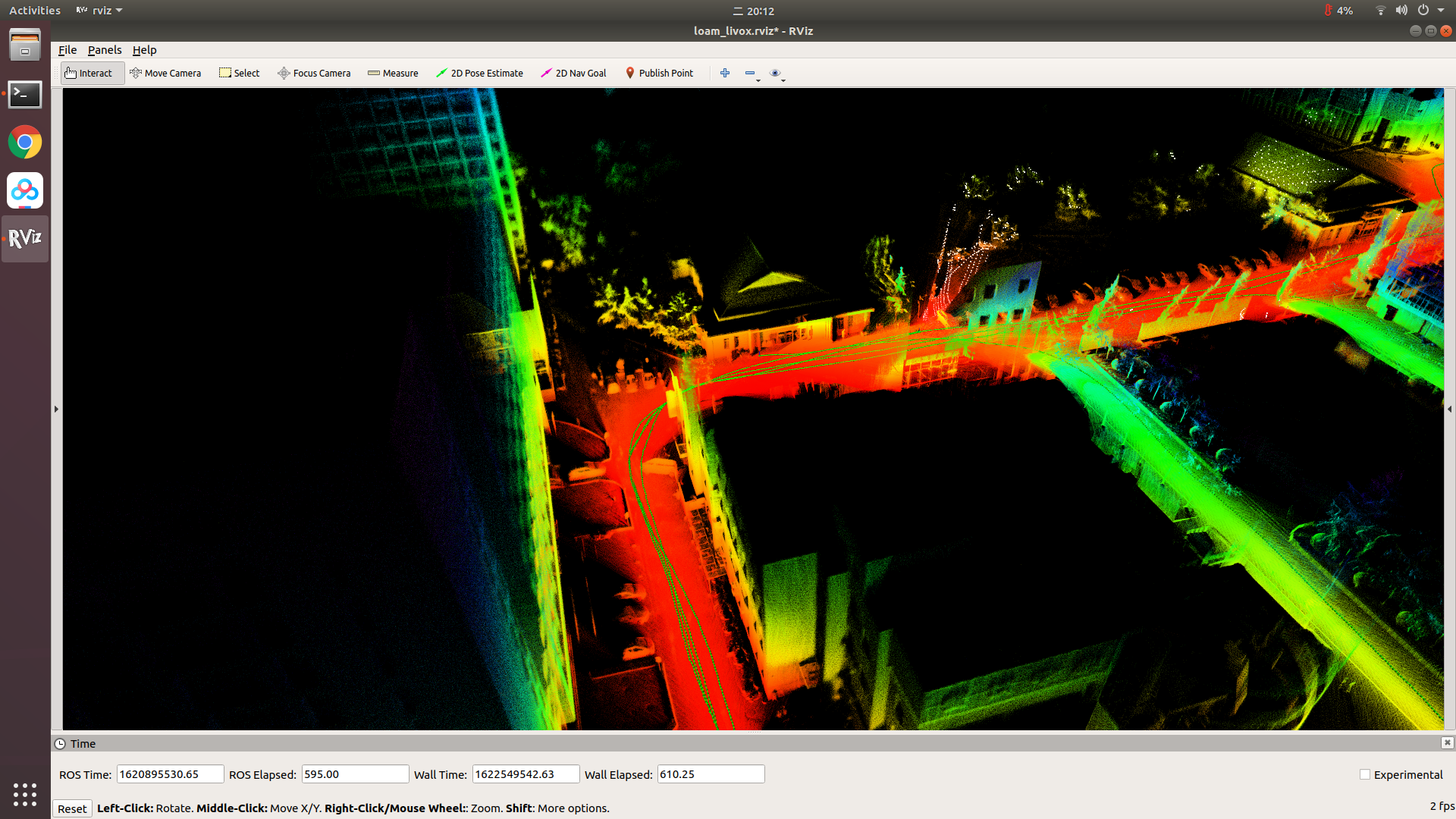
 用GNSS后(回环成功)
用GNSS后(回环成功)
我是搞测绘的。 1、你用的Gps是什么? 2、精度验证了吗? 我试过livox-loam lili-om 还有这个,手里有reach m2 的Gps 还有mti-300的imu ,接下来首先准备完成lidar(livox-horizon)与imu的标定,然后再考虑接入Gps,希望有机会大家一起搞! 谢谢🙏!
------------------ 原始邮件 ------------------ 发件人: duanqigeng @.> 发送时间: 2021年6月1日 20:24 收件人: hku-mars/FAST_LIO @.> 抄送: Weiguo Zhao @.>, Comment @.> 主题: 回复:[hku-mars/FAST_LIO] 无人机设计图 (#18)
哈哈哈,都是人家的底子打得好 大场景之下确实会出现部分问题 在用GNSS前(两层,没有回环成功)
用GNSS后(回环成功)
— You are receiving this because you commented. Reply to this email directly, view it on GitHub, or unsubscribe.
您的工作真的太棒了 我在您的代码的基础上做了一点儿微小的工作,增加了GNSS校准功能,在大场景之下提高了鲁棒性,在进行评估之后会找您进行代码合并。 请问您有这个小型无人机的设计图纸和零件的购买链接么,我也想在进行UAV SLAM验证(ps.horizon特别适合放在无人机上,所以请问第二版什么时候上线哈哈哈
这个是我的一些效果:
2021-06-06.01.11.32.mp4
非常感谢你的关注!期待有一天能把GNSS加入FAST-LIO中。
- 关于飞机,飞机全部是我自己设计的,源文件应该不会开源,不过我之后会开源一些参考的stl文件,可以进行3d打印。关于这个飞机以及FAST LIO,可以看一下我们组另一个项目 https://github.com/hku-mars/dyn_small_obs_avoidance
- 第二版其实已经开发完,只是论文还在写,还有一些对照实验需要进行,所以得等文章投出去才能开源。我也想尽快开源,奈何我写文章实在是慢。
我是搞测绘的。 1、你用的Gps是什么? 2、精度验证了吗? 我试过livox-loam lili-om 还有这个,手里有reach m2 的Gps 还有mti-300的imu ,接下来首先准备完成lidar(livox-horizon)与imu的标定,然后再考虑接入Gps,希望有机会大家一起搞! 谢谢🙏! … ------------------ 原始邮件 ------------------ 发件人: duanqigeng @.> 发送时间: 2021年6月1日 20:24 收件人: hku-mars/FAST_LIO @.> 抄送: Weiguo Zhao @.>, Comment @.> 主题: 回复:[hku-mars/FAST_LIO] 无人机设计图 (#18) 哈哈哈,都是人家的底子打得好 大场景之下确实会出现部分问题 在用GNSS前(两层,没有回环成功) 用GNSS后(回环成功) — You are receiving this because you commented. Reply to this email directly, view it on GitHub, or unsubscribe.
非常谢谢你,帮我回答了很多问题!我其实个人感觉horizon可能不是很适合测绘,高度方向的精度比较难保证,avia总的来讲可能更好一些。
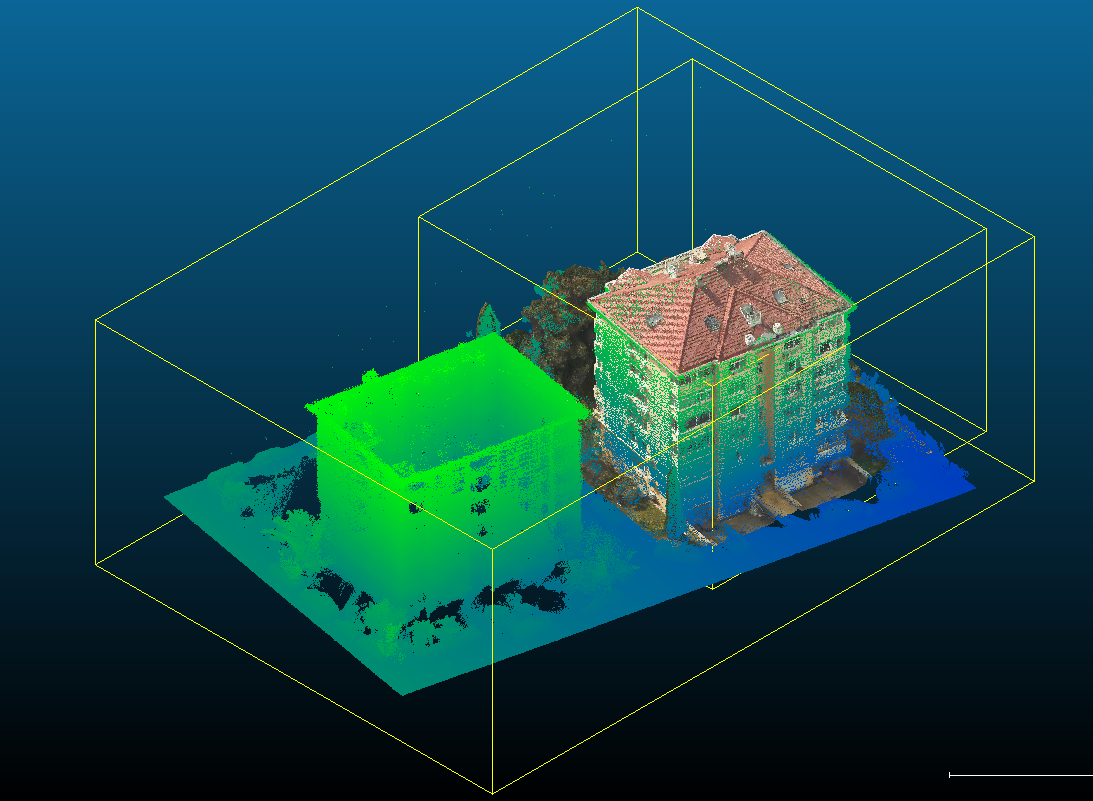
您好,我们已经经过精度评估了。
如果可以的话,我们实验室有一定的经费,愿意购买您设计的无人机(因为入门实在是太耗精力了) 我的邮箱 [email protected]
之后我们会开源出鸿雁UAV的stl文件,大部分零件可以3D打印制作。不过商业上的事情您可以联系我们导师张富老师 [email protected]。 另外,如果做UAV的话,不太建议使用horizon,z方向的fov太小了,我比较建议用avia。
您的工作真的太棒了 我在您的代码的基础上做了一点儿微小的工作,增加了GNSS校准功能,在大场景之下提高了鲁棒性,在进行评估之后会找您进行代码合并。 请问您有这个小型无人机的设计图纸和零件的购买链接么,我也想在进行UAV SLAM验证(ps.horizon特别适合放在无人机上,所以请问第二版什么时候上线哈哈哈
这个是我的一些效果:
顺便想问下你用的哪一款GNSS?如果方便透露的话,我们用pixhawk的原生gps就感觉数据质量很差。
3dm-gx5-45 级别不低,我搞了一个gx3-25,咸鱼搞的,价格便宜,但级别太低!现在正在装mti-300,期待好结果!
------------------ 原始邮件 ------------------ 发件人: duanqigeng @.> 发送时间: 2021年6月3日 16:50 收件人: hku-mars/FAST_LIO @.> 抄送: Weiguo Zhao @.>, Comment @.> 主题: 回复:[hku-mars/FAST_LIO] 无人机设计图 (#18)
我记得我们使用的是liosam那款小型imu自带的雷达,具体的型号应该是3DM-GX5-45
— You are receiving this because you commented. Reply to this email directly, view it on GitHub, or unsubscribe.
我们也会使用avia进行测绘,现在用的也是的,我们使用GPS基本能达到2cm精度,使用北京唐驿的4Gdtu产品,千寻RTK,在ptp同步的情况下有4hz的GPS输出,比较稳定。根据原来的地图导航LBS算法的经验,现在正在便携针对gps不稳定时的优化筛选算法,但是现在在一些桥梁场景下比较成功,但是在隧道场景就不太行,还在优化评估
你可以试试MTI—680G,能便宜一半的价格。也是9轴+gnss,精度差距不大 其实还有一点需要注意的就是单天线rtk更适合高速场景,双天线rtk更适合低速场景
哈哈 ,去年就买了reach m2 Gps ,加上mti-300,还有horizon ,我期待能达成测绘级别的slam! 这周希望能达成livox-imu的标定,试试结果再接入Gps。 我总觉得:如果slam自身的精度不能到一定的程度,过分依赖Gps,就只能服务于汽车导航。
------------------ 原始邮件 ------------------ 发件人: duanqigeng @.> 发送时间: 2021年6月3日 17:14 收件人: hku-mars/FAST_LIO @.> 抄送: Weiguo Zhao @.>, Comment @.> 主题: 回复:[hku-mars/FAST_LIO] 无人机设计图 (#18)
你可以试试MTI—680G,能便宜一半的价格。也是9轴+gnss,精度差距不大
— You are receiving this because you commented. Reply to this email directly, view it on GitHub, or unsubscribe.
我咸鱼上收的mti-300,人民币5000元。应该还可以吧!
------------------ 原始邮件 ------------------ 发件人: duanqigeng @.> 发送时间: 2021年6月3日 17:14 收件人: hku-mars/FAST_LIO @.> 抄送: Weiguo Zhao @.>, Comment @.> 主题: 回复:[hku-mars/FAST_LIO] 无人机设计图 (#18)
你可以试试MTI—680G,能便宜一半的价格。也是9轴+gnss,精度差距不大
— You are receiving this because you commented. Reply to this email directly, view it on GitHub, or unsubscribe.
这个不是很清楚
在 2021年6月3日星期四,Weiguo Zhao @.***> 写道:
我咸鱼上收的mti-300,人民币5000元。应该还可以吧!
------------------ 原始邮件 ------------------ 发件人: duanqigeng @.> 发送时间: 2021年6月3日 17:14 收件人: hku-mars/FAST_LIO @.> 抄送: Weiguo Zhao @.>, Comment @.> 主题: 回复:[hku-mars/FAST_LIO] 无人机设计图 (#18)
你可以试试MTI—680G,能便宜一半的价格。也是9轴+gnss,精度差距不大
— You are receiving this because you commented. Reply to this email directly, view it on GitHub, or unsubscribe.
— You are receiving this because you modified the open/close state. Reply to this email directly, view it on GitHub https://github.com/hku-mars/FAST_LIO/issues/18#issuecomment-853726817, or unsubscribe https://github.com/notifications/unsubscribe-auth/AQ5LC75QUXEZEOYRERDUWT3TQ5DA5ANCNFSM453HBFOQ .
我用英国的geoslam搞过隧道,一开始怎么都不成功。后来绝望就将各种参数调到最大,50分钟的数据,后处理用了近4个小时。 所以,如果咱们这个slam的迭代参数,分块大小可以调整,还有就是对后处理时间没有限制,那么就一定可以。 我总是觉得没有完全的必要性,非要达成实时完成,后处理能提高精度的情况下,一定会更有意思。可能这些想法太基于测绘这个小专业了!
------------------ 原始邮件 ------------------ 发件人: duanqigeng @.> 发送时间: 2021年6月3日 17:03 收件人: hku-mars/FAST_LIO @.> 抄送: Weiguo Zhao @.>, Comment @.> 主题: 回复:[hku-mars/FAST_LIO] 无人机设计图 (#18)
我们也会使用avia进行测绘,现在用的也是的,我们使用GPS基本能达到2cm精度,使用北京唐驿的4Gdtu产品,千寻RTK,在ptp同步的情况下有4hz的GPS输出,比较稳定。我跟姐原来有一定地图导航的LBS服务的经验,现在正在便携针对gps不稳定时的优化筛选算法,但是现在在一些桥梁场景下比较成功,但是在隧道场景就不太行,还在优化评估
— You are receiving this because you commented. Reply to this email directly, view it on GitHub, or unsubscribe.
This issue has been automatically marked as stale because it has not had recent activity. It will be closed if no further activity occurs. Thank you for your contributions.