GAAS
 GAAS copied to clipboard
GAAS copied to clipboard
GAAS is an open-source program designed for fully autonomous VTOL(a.k.a flying cars) and drones. GAAS stands for Generalized Autonomy Aviation System.
Bumps [pyyaml](https://github.com/yaml/pyyaml) from 3.12 to 5.4. Changelog Sourced from pyyaml's changelog. 5.4 (2021-01-19) yaml/pyyaml#407 -- Build modernization, remove distutils, fix metadata, build wheels, CI to GHA yaml/pyyaml#472 -- Fix for...

# Yolo目标追踪仿真文档 ## 1. 建立仿真环境 参考[GAAS全局目标追踪教程](https://gaas.gitbook.io/guide/software-realization-build-your-own-autonomous-drone/untitled-1) ## 2.制作数据集 ### 2.1.启动仿真(以GAAS第六讲中的小车为例) ``` roslaunch px4 car_tracking.launch ``` 上述命令会启动仿真,生成一个小车,以及无人机。(在场景中多插入一些干扰物可以提高数据集的质量)  ``` robin@robin-G3-3590:~/px4/GAAS/demo/tutorial_6/6_object_tracking$ python px4_mavros_run.py robin@robin-G3-3590:~/px4/GAAS/demo/tutorial_6/6_object_tracking$ python init_drone.py ``` 打开rviz确认小车出现在摄影机的视野中. ``` 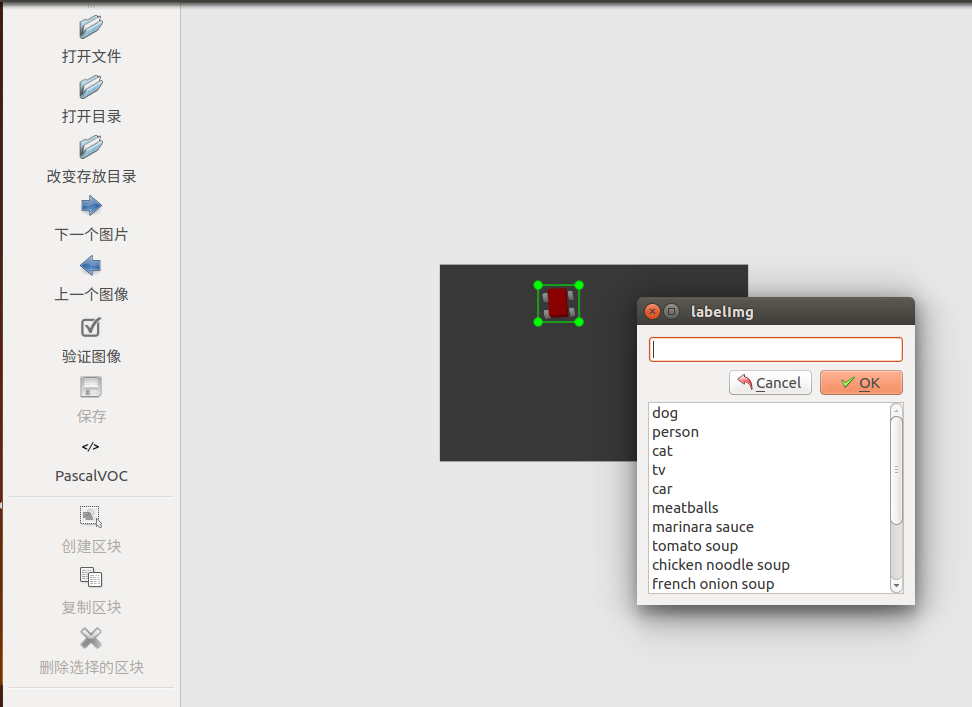 rviz ```...
Hello, I am following Tutorial 3 for SLAM in a GPS denied environment. I have installed all required dependencies, but when I have to run `sh generate.sh` inside GAAS/software/SLAM/ygz_slam_ros I...
# Prerequisites Please answer the following questions for yourself before submitting an issue. **YOU MAY DELETE THE PREREQUISITES SECTION.** - [x] I am running the latest version of GAAS -...
Hi, I am working on tutorials 4, and solve the issue of run.sh like mentioned in other issues. However, my Octomap doesn't work since it says noting to publish. I...
I successfully completed tutorial 1 and 2, and was stuck on tutorial 6. When I was trying to run set_init.py to set the initial coordinates for the ground car, it...
Context ROS: 1.14.5 OS: Melodic Gazebo: 9 Ubuntu: 18.04 System Platform: [eg. X86_64] Expected Behavior Landing function, land the drone and disarm the drone Current Behavior at the end of...
[https://www.gaas.dev/]() appears to be down, with a Wix.com page that says this domain isn't connected to a website.
# Prerequisites Please answer the following questions for yourself before submitting an issue. **YOU MAY DELETE THE PREREQUISITES SECTION.** - [x] I am running the latest version of GAAS -...
Metadata
Owner
Metadata
GAAS is an open-source program designed for fully autonomous VTOL(a.k.a flying cars) and drones. GAAS stands for Generalized Autonomy Aviation System.