Request of SpeedyBee F7V2 Wifi BLE chip disable during ARM
@DzikuVx
Dear Pawel, Please kindly help for SpeedyBeeF7V2 board there was an internal wifi/ble chip. Can it be turned off during arm? To avoid 2.4Ghz interference. I requested this since in Inav no remap resources and pinio setup. 🙏 This is true PA15 control those enable like in Betaflight but I didn't see any correlation with arm flag. Not sure about this.
Could u pls help. Thanks and appreciate this.
Thanks so much Ditto
is this fixed is 3.0.2 ? this would explain failsafes i have had at medium range on 3.0.1
Yes. In 3.0.2 no pinio destination for turn it off. Pin A15
On Tue, Sep 21, 2021, 10:56 PM martink1974 @.***> wrote:
no its not fixed this still affects range of 2.4g links
— You are receiving this because you authored the thread. Reply to this email directly, view it on GitHub https://github.com/iNavFlight/inav/issues/7449#issuecomment-924124915, or unsubscribe https://github.com/notifications/unsubscribe-auth/ALWZHPSAB3SBEBHEBQL2373UDCTKLANCNFSM5EEBG2GQ . Triage notifications on the go with GitHub Mobile for iOS https://apps.apple.com/app/apple-store/id1477376905?ct=notification-email&mt=8&pt=524675 or Android https://play.google.com/store/apps/details?id=com.github.android&referrer=utm_campaign%3Dnotification-email%26utm_medium%3Demail%26utm_source%3Dgithub.
This issue / pull request has been automatically marked as stale because it has not had any activity in 60 days. The resources of the INAV team are limited, and so we are asking for your help. This issue / pull request will be closed if no further activity occurs within two weeks.
I confirm, ARMING does not disable Bluetooth module with iNAV 4.1.0.
Speedybee support says this should work out of the box with iNAV...
For BF they give some instructions on the CLI to make it work: https://speedybee.zendesk.com/hc/en-us/articles/5390784259099-Will-flashing-custom-firmware-for-SpeedyBee-F7-V2-flight-controller-affect-Bluetooth-and-WIFI-functions-
Does iNAV provides some equivalent commands ?
# resource
IO:
----------------------
...
A15: PINIO1 OUT
...
# get pinio_box
pinio_box1 = 47
Allowed range: 0 - 255
pinio_box2 = 255
Allowed range: 0 - 255
pinio_box3 = 255
Allowed range: 0 - 255
pinio_box4 = 255
Allowed range: 0 - 255
Could somebody kindly give directions in source code, where to customize target in order to change PÏNIO1 level when arming/disarming ? Thanks
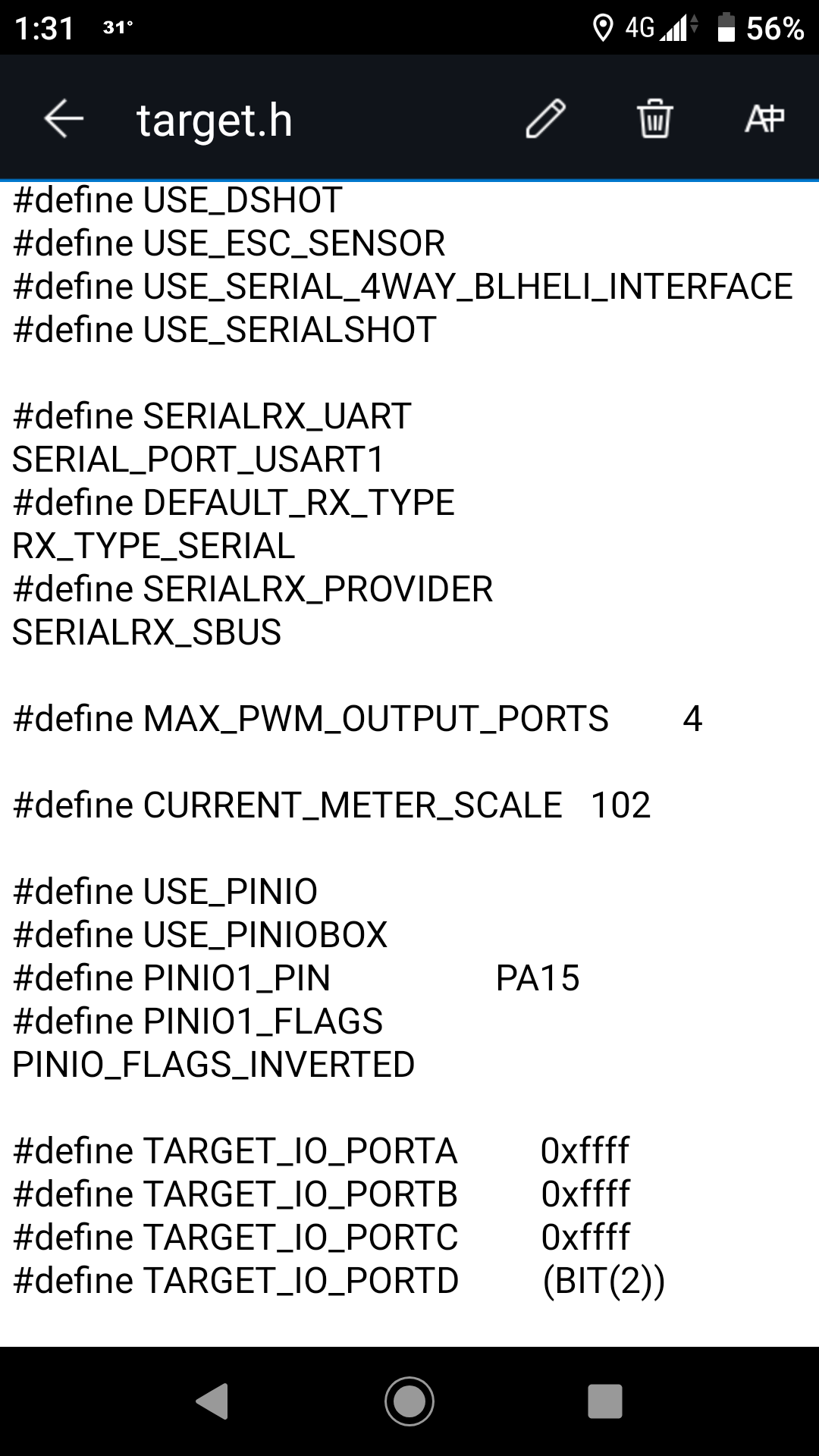
In Speedybee target.h, one can find:
#define USE_PINIOBOX
In main/fc/fc_core.c:processRX(), one can find:
#ifdef USE_PINIOBOX
pinioBoxUpdate();
#endif
In main/io/piniobox.c:pinioBoxUpdate(), one can see a loop on the 4 pins (PINIO_COUNT):
pinioSet(i, IS_RC_MODE_ACTIVE(pinioBoxRuntimeConfig.boxId[i]));
In main/fc/rc_modes.c, one can see:
bool IS_RC_MODE_ACTIVE(boxId_e boxId)
{
return bitArrayGet(rcModeActivationMask.bits, boxId);
}
In main/io/piniobox.h, one can see
#define BOX_PERMANENT_ID_USER1 47
So I would assume that PINIO1_PIN is assigned to BOXUSER1 flight mode (defined in rc_modes.h) ?
In inav Mode config, I tried to assign USER1 to the same channel than ARM, expecting that it would drive PINIO1. Unfortunately it does not work.