Greg Cowell
Greg Cowell
I've repeated your data logging experiment. Below are the results. Each graph uses the same data set. I've zoomed in to show more detail. My script just samples as quickly...
>In the second plot, just before 700 ms, do you think this is due to the sensor or could there have been a mechanical disturbance? I'm guessing it was just...
I've updated the code as per your suggestions and the sampling rate is much faster. I'll collect some more data and post the results.
Results with the fastest possible sampling rate: 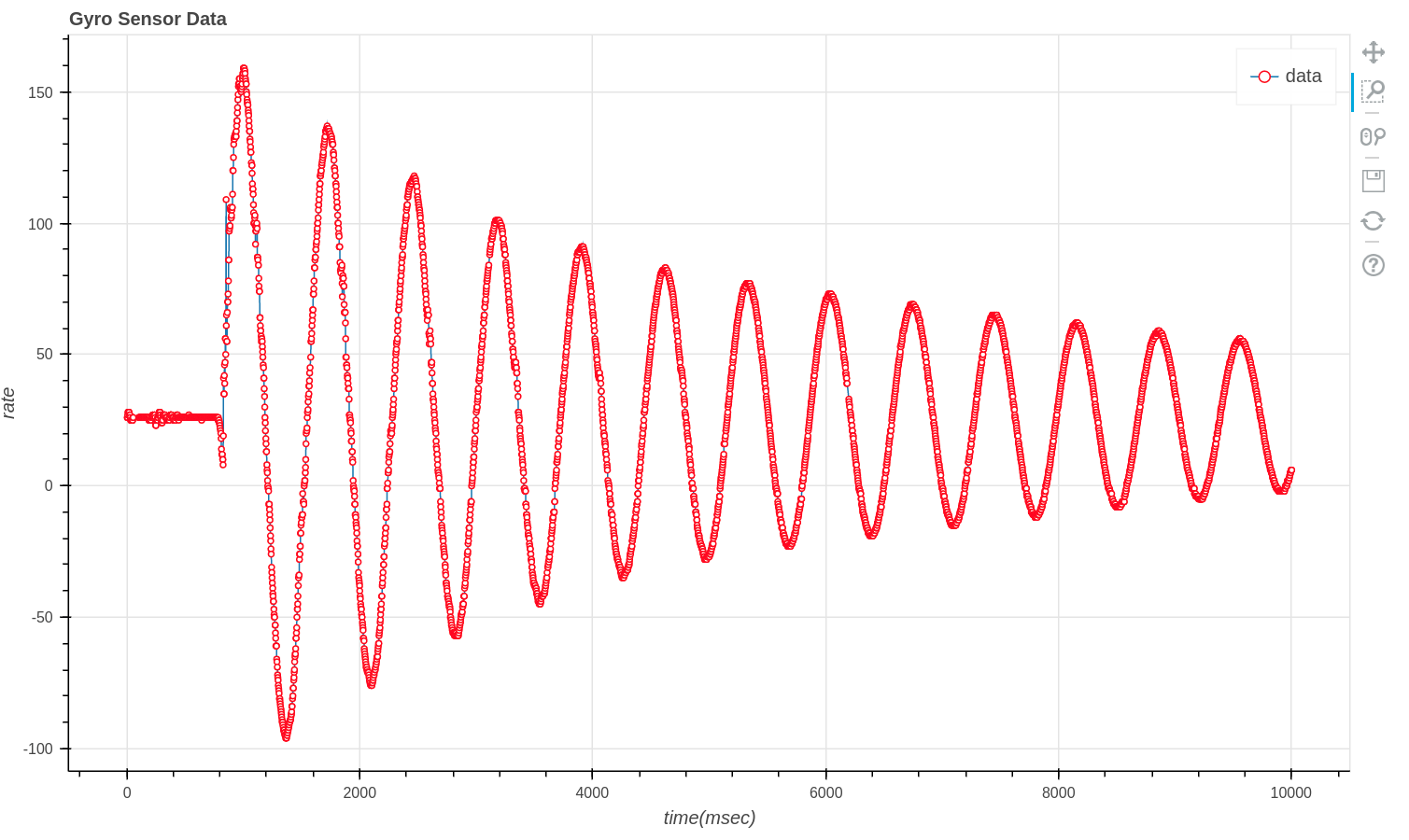 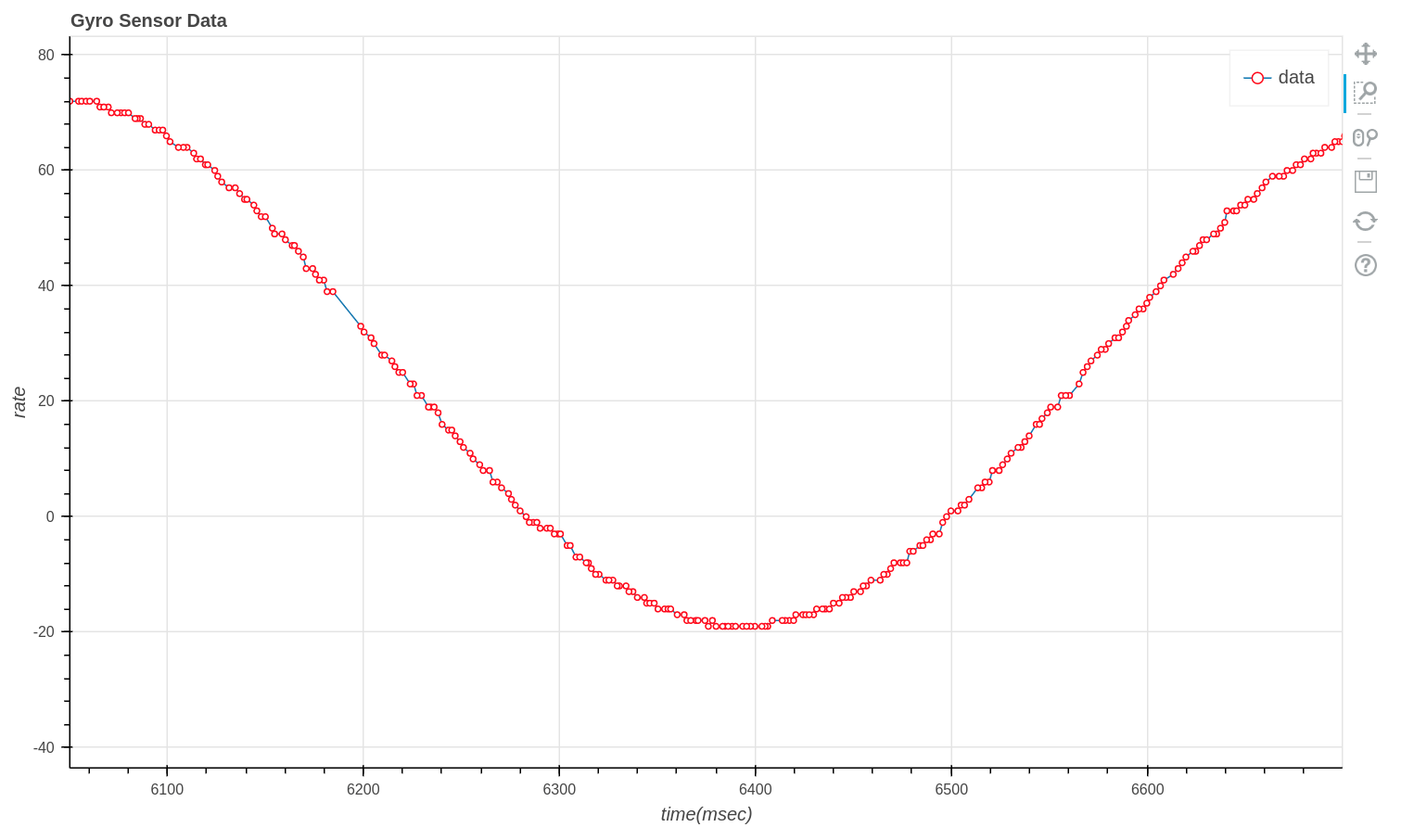 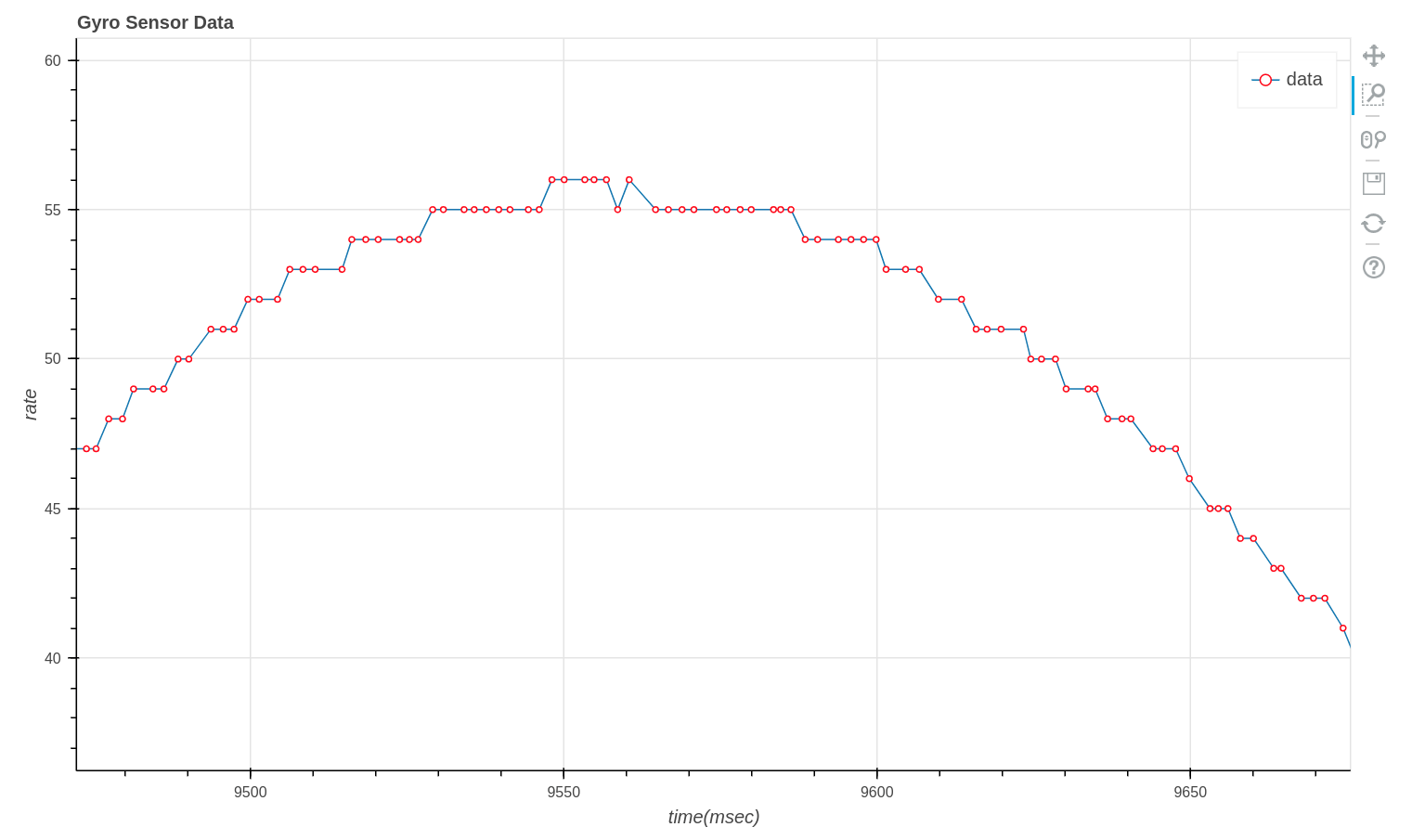 The axles turn slightly as the swing direction changes. I wonder if this has any significant effect on the results.
>Do you see both case (1) and (2) of this post in your data? Yep, both occur when the sample rate is below 20ms. Given that your segway code uses...
Here is my first attempt at logging data while the segway is balancing. You may have suggestions for other data I could collect. I've just collected loop duration and gyro...
>This may still correlate with the UART sensor(s), WiFi, Bluetooth, by the way, since they cause extra kernel activity. I agree. I have not been using Bluetooth or WiFi though....
I set the nice level on the python script to -19. I did not see any long loop times but interestingly the robot still fell over. 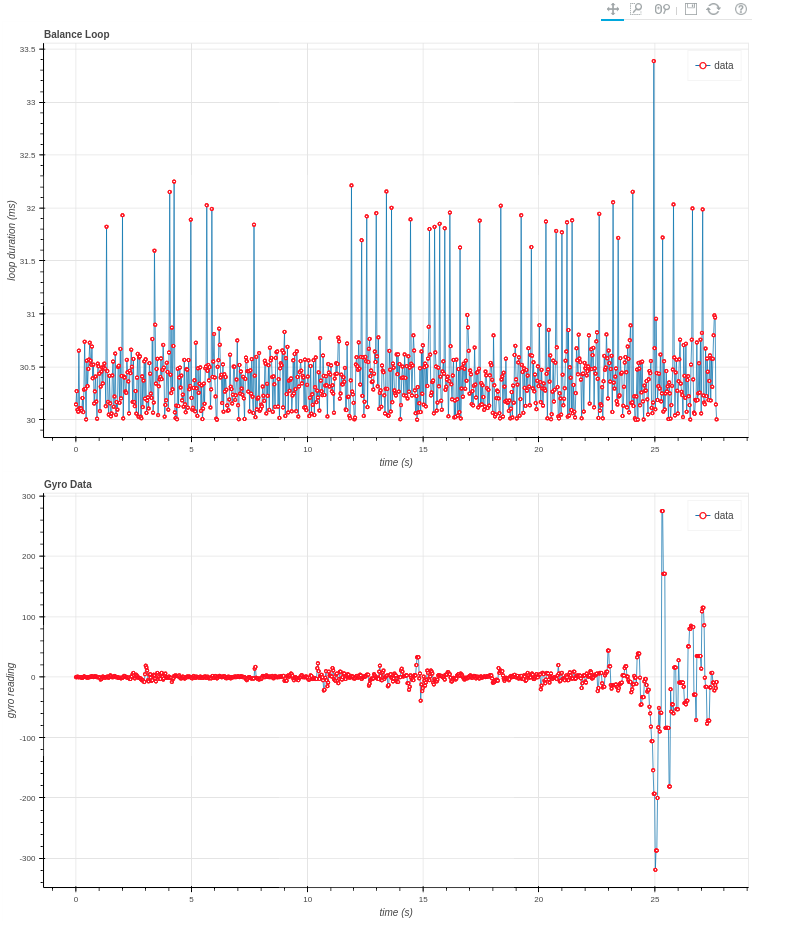
Hi Thomas, sounds great. Django has support for translation and it would be good to make use of that in Roster Wizard. Kind regards, Greg
Yes, good idea.