ros_gz
 ros_gz copied to clipboard
ros_gz copied to clipboard
Release for rolling?
In a project I have, I was using ros_ign_bridge as a library (ie. #include "ros_ign_bridge/convert/sensor_msgs.hpp"), rather than as a standalone node.
Unfortunately, this broke on humble during the transition from ros_ign_bridge -> ros_gz_bridge. So I decided to change all ros_ign_bridge -> ros_gz_bridge in my project, but then now the rolling CI (which ran on the same branch) is failing because a release hasn't been made since the rename.
I could go about splitting up my humble and rolling branch and running CI separately, but the problem will disappear once ros_gz_bridge is available in rolling.
Could I request the maintainers for a release for rolling please?
I have a large port from galactic to rolling to get in (#275) and then I think we will be good for a release.
Just a very gentle ping on this @mjcarroll. Sorry if this is on your todo list already!
Hi @mjcarroll, do you have any updates on making a release?
For a while, it's been like this:
- galactic / rolling: ros_ign
- humble: ros_gz (or ros_ign with a deprecation warning)
A release would help cutting-edge rolling users a lot. What are the roadblockers?
Is this correct that it is still not released for rolling?
Furthermore, in contrast to the compatibility table in the README.md the ros2 branch is not compatible with fortress any more -> I have to use humble branch to compile it for rolling+fortress. Or have I missed something?
https://github.com/gazebosim/ros_gz/blob/7c62a1ce3cfb4eb3b54e1cfd092c9b63a9d5f255/ros_gz_sim/CMakeLists.txt#L38
Is this correct that it is still not released for rolling?
Furthermore, in contrast to the compatibility table in the README.md the ros2 branch is not compatible with fortress any more -> I have to use humble branch to compile it for rolling+fortress. Or have I missed something?
https://github.com/gazebosim/ros_gz/blob/7c62a1ce3cfb4eb3b54e1cfd092c9b63a9d5f255/ros_gz_sim/CMakeLists.txt#L38
I just ran into this too.
It looks like part of this PR: https://github.com/gazebosim/ros_gz/pull/302 broke ros2 general compatibility as described in the README.md table:
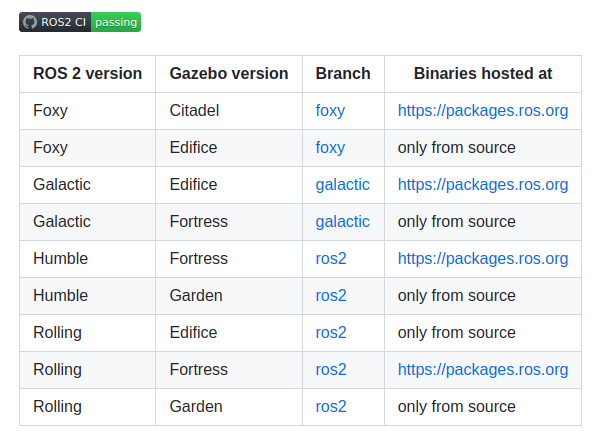
PR 302 removed all the depend conditions from the package.xml, so if you take the ros2 branch it only supports garden... humble still works (If you take the humble branch, but that is not what the table describes) but it is broken on rolling out of the box, you can no longer just use the ros2 branch unless you go through the additional steps of installing gazebo garden but rolling + garden require installing from source?
@mjcarroll & @azeey was that intentional?
https://github.com/gazebosim/ros_gz/pull/302/files?file-filters%5B%5D=.xml&show-deleted-files=true&show-viewed-files=true
For humble, you should now be using the humble branch. I am making a release for rolling/iron and fortress.
I think it's okay to do Fortress/Rolling binary releases while Iron is still pending, but once it's released, we should switch to preparing for the Gazebo Harmonic/ROS J-turtle pairing. So in that sense, the This branch is only compatible with Gazebo Garden forward. message seems correct, albeit a little early.
I think it's okay to do Fortress/Rolling binary releases while Iron is still pending, but once it's released, we should switch to preparing for the Gazebo Harmonic/ROS J-turtle pairing. So in that sense, the
This branch is only compatible with Gazebo Garden forward.message seems correct, albeit a little early.
:+1: If the Fortress/Rolling binary release also has a rolling branch that source builds can depend on similar to the humble branch then that sounds great