habitat-lab
 habitat-lab copied to clipboard
habitat-lab copied to clipboard
Habitat 2.0 ArmEEAction Does not run
Habitat-Lab and Habitat-Sim versions
Habitat-Lab: v0.2.1
Habitat-Sim: v0.2.1
Habitat is under active development, and we advise users to restrict themselves to stable releases of Habitat-Lab and Habitat-Sim. The bug you are about to report may already be fixed in the latest version.
Master branch contains 'bleeding edge' code, but we do appreciate bug reports for it!
🐛 Bug
I tried to switch the controller for the mobile manipulator from joint position control to end-effector and I find that the ik object itself is not found in the simulator.
Steps to Reproduce
Steps to reproduce the behavior:
Change Line 96 in rearrangepick_replica_cad.yaml to
ARM_CONTROLLER: "ArmEEAction"
Then run python examples/example.py
Output:
Traceback (most recent call last):
File "examples/example.py", line 30, in <module>
example()
File "examples/example.py", line 19, in example
observations = env.reset() # noqa: F841
File "/home/mdalal/research/mobile_manip/habitat-lab/habitat/core/env.py", line 222, in reset
observations = self.task.reset(episode=self.current_episode)
File "/home/mdalal/research/mobile_manip/habitat-lab/habitat/tasks/rearrange/rearrange_pick_task.py", line 140, in reset
super().reset(episode)
File "/home/mdalal/research/mobile_manip/habitat-lab/habitat/tasks/rearrange/rearrange_task.py", line 54, in reset
observations = super().reset(episode)
File "/home/mdalal/research/mobile_manip/habitat-lab/habitat/core/embodied_task.py", line 288, in reset
action_instance.reset(episode=episode, task=self)
File "/home/mdalal/research/mobile_manip/habitat-lab/habitat/tasks/rearrange/actions.py", line 65, in reset
self.arm_ctrlr.reset(*args, **kwargs)
File "/home/mdalal/research/mobile_manip/habitat-lab/habitat/tasks/rearrange/actions.py", line 351, in reset
arm_pos = self.set_desired_ee_pos(np.array([0.5, 0.0, 1.0]))
File "/home/mdalal/research/mobile_manip/habitat-lab/habitat/tasks/rearrange/actions.py", line 377, in set_desired_ee_pos
ik.set_arm_state(joint_pos, joint_vel)
AttributeError: 'NoneType' object has no attribute 'set_arm_state'
Expected behavior
Run 200 steps in the environment without erroring.
Yes, I have pybullet installed already. version 3.0.4 Any thoughts on what else the issue could be? Does it work fine on your end?
I think you just ot load the URDF as in examples/interactive_play.py:
config.SIMULATOR.IK_ARM_URDF = (
"./data/robots/hab_fetch/robots/fetch_onlyarm.urdf"
)
By the way, this issue should now be resolved on main.
Also, the hab_suite branch now contains most of the functionality from the paper and we are slowly merging this into main. We made this tutorial to help get started with Habitat 2.0.
Please let me know if you have any more questions!
I just tried the hab_suite branch and it seems to have the same issue, specifically self._sim.ik_helper is None Main has the same error as well:
Traceback (most recent call last):
File "examples/example.py", line 28, in <module>
example()
File "examples/example.py", line 17, in example
observations = env.reset() # noqa: F841
File "/home/mdalal/research/mobile_manip/habitat-lab/habitat/core/env.py", line 255, in reset
observations = self.task.reset(episode=self.current_episode)
File "/home/mdalal/research/mobile_manip/habitat-lab/habitat/tasks/rearrange/sub_tasks/pick_task.py", line 144, in reset
super().reset(episode)
File "/home/mdalal/research/mobile_manip/habitat-lab/habitat/tasks/rearrange/rearrange_task.py", line 70, in reset
observations = super().reset(episode)
File "/home/mdalal/research/mobile_manip/habitat-lab/habitat/core/embodied_task.py", line 288, in reset
action_instance.reset(episode=episode, task=self)
File "/home/mdalal/research/mobile_manip/habitat-lab/habitat/tasks/rearrange/actions.py", line 78, in reset
self.arm_ctrlr.reset(*args, **kwargs)
File "/home/mdalal/research/mobile_manip/habitat-lab/habitat/tasks/rearrange/actions.py", line 333, in reset
cur_ee = self._sim.ik_helper.calc_fk(
AttributeError: 'NoneType' object has no attribute 'calc_fk'
[19:34:16:986295]:[Sim] Simulator.cpp(65)::~Simulator : Deconstructing Simulator
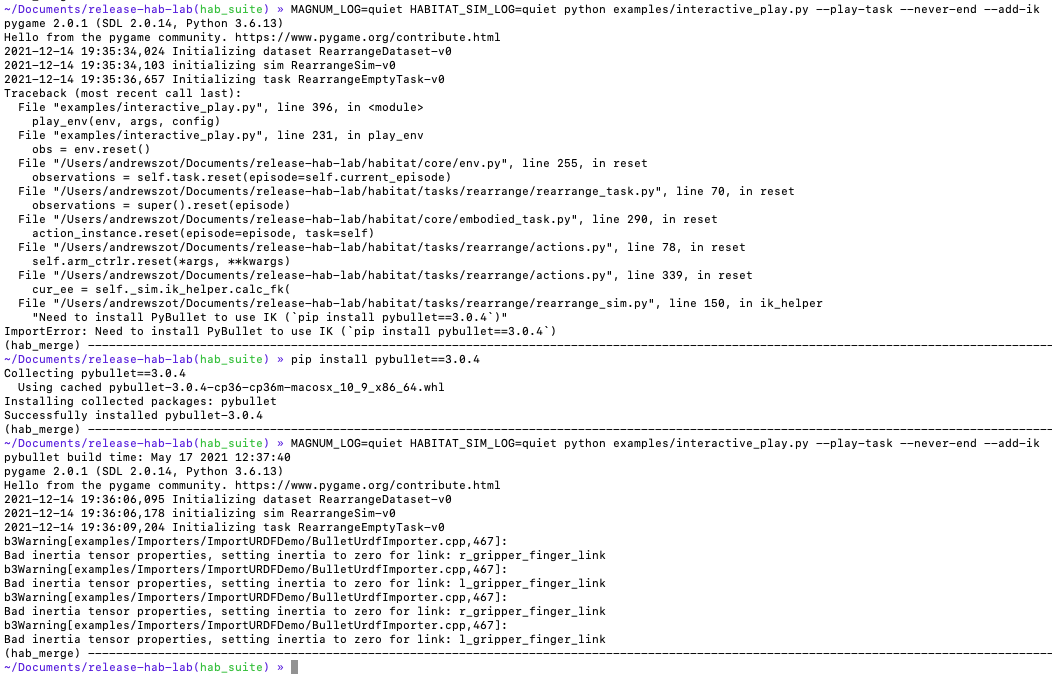
That is surprising. I just tried and it works for me. Here is the exact command I ran python examples/interactive_play.py --play-task --never-end --add-ik, does that exact command work for you? I think you are still somehow using an old interactive play script since it should also print an error when PyBullet is not configured. Below is are the outputs I see for a fresh install:
Okay using your command things seem to be working now: I was running python examples/example.py and that does not seem to work. I am assuming that things work in this new script due to --add-ik flag.
I just tried the hab_suite branch and it seems to have the same issue, specifically self._sim.ik_helper is None Main has the same error as well:
Traceback (most recent call last): File "examples/example.py", line 28, in <module> example() File "examples/example.py", line 17, in example observations = env.reset() # noqa: F841 File "/home/mdalal/research/mobile_manip/habitat-lab/habitat/core/env.py", line 255, in reset observations = self.task.reset(episode=self.current_episode) File "/home/mdalal/research/mobile_manip/habitat-lab/habitat/tasks/rearrange/sub_tasks/pick_task.py", line 144, in reset super().reset(episode) File "/home/mdalal/research/mobile_manip/habitat-lab/habitat/tasks/rearrange/rearrange_task.py", line 70, in reset observations = super().reset(episode) File "/home/mdalal/research/mobile_manip/habitat-lab/habitat/core/embodied_task.py", line 288, in reset action_instance.reset(episode=episode, task=self) File "/home/mdalal/research/mobile_manip/habitat-lab/habitat/tasks/rearrange/actions.py", line 78, in reset self.arm_ctrlr.reset(*args, **kwargs) File "/home/mdalal/research/mobile_manip/habitat-lab/habitat/tasks/rearrange/actions.py", line 333, in reset cur_ee = self._sim.ik_helper.calc_fk( AttributeError: 'NoneType' object has no attribute 'calc_fk' [19:34:16:986295]:[Sim] Simulator.cpp(65)::~Simulator : Deconstructing Simulator
I am having the same issue now. while trying to build on articulated_agents_tutorial.ipynb in the latest version of the repo. @rpartsey @ASzot do you have any ideas on how to fix this? essentially, my env.sim.ik_helper is None always.