habitat-lab
 habitat-lab copied to clipboard
habitat-lab copied to clipboard
Incorrect ee_target inside ArmEEAction
Habitat-Lab and Habitat-Sim versions
Habitat-Lab: v0.2.4 Habitat-Sim: v0.2.3
🐛 Bug
I'm trying to control the arm with ArmEEAction. Howerver, I find the ee_target ArmEEAction which is calculated from _ik_helper is not aligned with the end effector. Thus, I can not correctly move the end effector to the desired position.
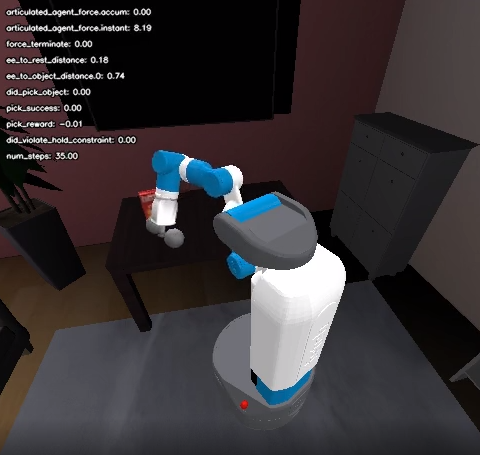
The visualized ee_target and the visualized end effector position using the function visualize_position are here:

Expected behavior
The ee_target should be aligned with the end-effector
Would you please give any suggestions on this?
Thank you so much!
@Murkey8895 Hello, I am trying to achieve similar functionality of the end-effector. could you possibly share your ArmEEAction code?
Specifically, I am getting env.sim.agent_mgrs[0].ik_helper = None @Murkey8895