PyTV-4D
 PyTV-4D copied to clipboard
PyTV-4D copied to clipboard
Python routines to compute the Total Variation (TV) of 2D, 3D and 4D images on CPU & GPU. Compatible with proximal algorithms (ADMM, Chambolle & Pock, ...)
PyTV-4D
A set of Python routines to compute the Total Variation (TV) of 2D, 3D and 4D (3D and time) images on CPU & GPU, in application to image denoizing and iterative Computed Tomography (CT) reconstructions. The time-resolved capabilities are useful for dynamic CT or motion artifact corrections. This is the code used in this article.
- Current features
- Installation
- CPU & GPU
- CPU Only
- Testing
- Getting started
- Computing TV and subgradient
- Denoizing an image
- Accelerated convergence using gradient operators
- PyTV functions overview
- TV definition
- Comments
- Cite
- License
Current features
- Explicit functions to compute the total variation of 2D, 3D, and 4D images.
- Functions return subgradients for easy implementation of (sub)-gradient descent.
- Efficient GPU implementations using PyTorch tensors and convolution kernels.
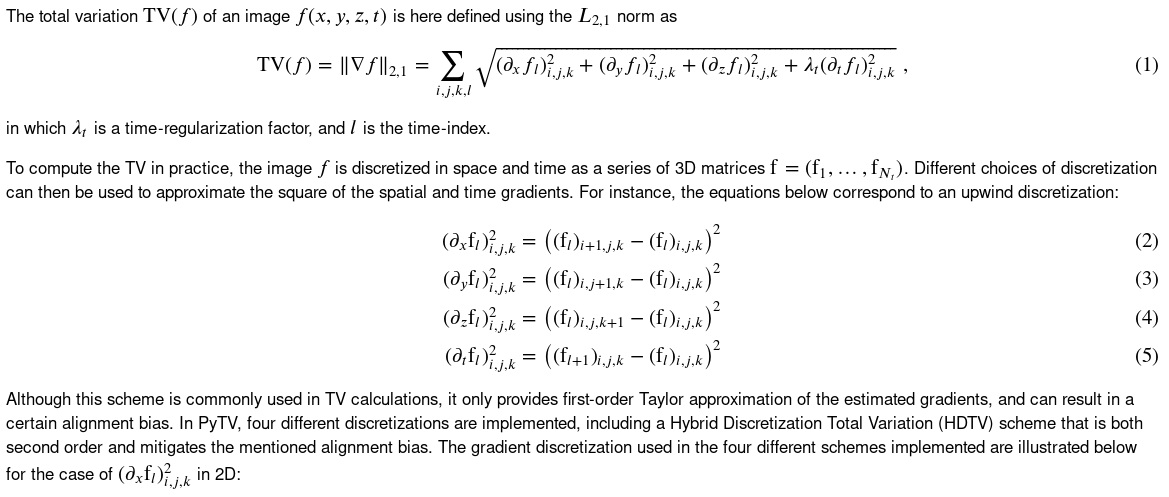
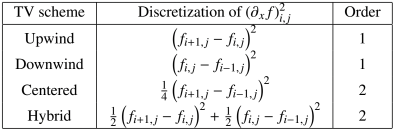
- Four different spatial discretization schemes are available: upwind, downwind, central, and hybrid (see below).
- Operator-form implementation compatible with primal-dual and proximal formulations (ADMM, Chambolle & Pock algorithm, ...)
Installation
CPU & GPU
Conda [Recommended]
First, install PyTorch (version at least 1.5.0) following the guidelines on the official website. Make sure to install the correct version for your setup to enable GPU computations.
Then, the PyTV-4D files can be installed as a package using anaconda:
conda install -c eboigne pytv
Manual installation
PyTV-4D can also be installed manually with (dependencies need to be set properly):
python setup.py install
CPU Only
For a quick installation running the CPU routines only, install numpy and PyTV-4D using anaconda, skipping the PyTorch dependency for PyTV-4D:
conda install numpy && conda install --no-deps -c eboigne pytv
Testing
Once installed, you can run some basic tests on CPU and GPU:
import pytv
pytv.run_CPU_tests()
pytv.run_GPU_tests()
Note that the tests may fail because of bad rng, so try running it a couple times.
Getting started
See the details below and the getting started Jupyter notebook.
Computing TV and subgradient
Below is a simple example to compute the total variation and sub-gradient on CPU and GPU:
import pytv
import numpy as np
Nz, M, N = 20, 4, 100 # 4D Image dimensions. M is for time.
np.random.seed(0)
img = np.random.rand(Nz, M, N, N)
tv1, G1 = pytv.tv_CPU.tv_hybrid(img)
tv2, G2 = pytv.tv_GPU.tv_hybrid(img)
print('TV value from CPU: '+str(tv1))
print('TV value from GPU: '+str(tv2))
print('Sub-gradients from CPU and GPU are equal: '+str(np.prod(np.abs(G1-G2)<1e-5)>0))
Output is:
TV value from CPU: 532166.8251801673
TV value from GPU: 532166.8
Sub-gradients from CPU and GPU are equal: True
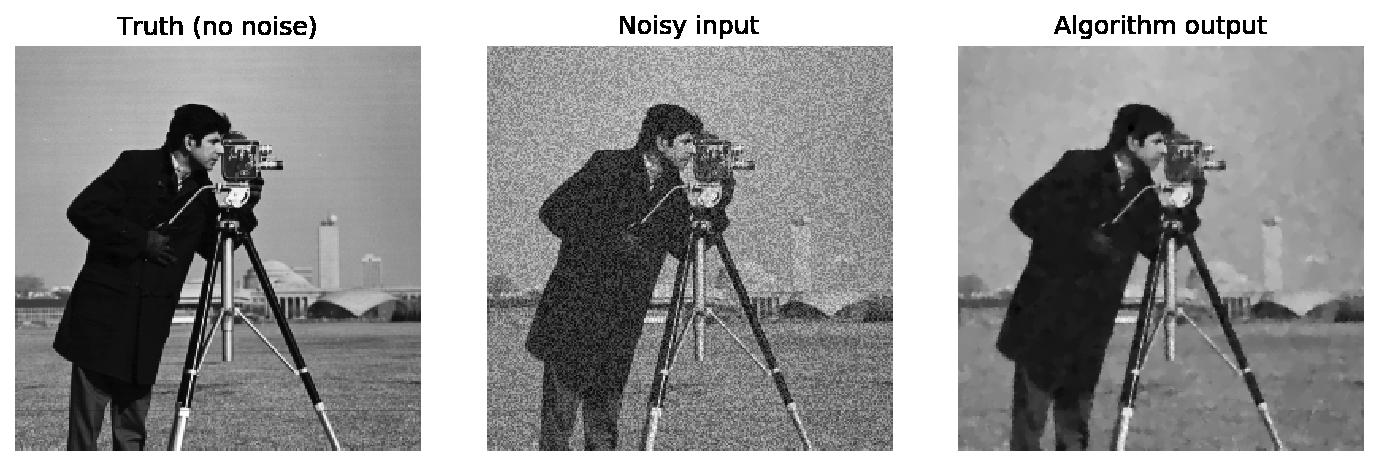
Denoizing an image
A simple example of image denoizing using the total variation. The following loss function is minimized:
where is the current image,
is the input noisy image, and
is a regularization parameter.
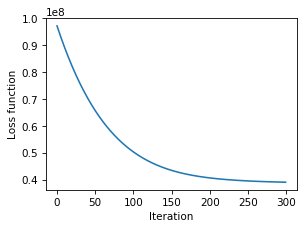
Because the TV is not everywhere differentiable, the sub-gradient descent method is used to minimize this loss function:
noise_level = 100
nb_it = 300
regularization = 25
step_size = 5e-3 # If step size is too large, loss function may not decrease at every step
np.random.seed(0)
cameraman_truth = pytv.utils.cameraman() # Open the cameraman's grayscale image
cameraman_truth = np.reshape(cameraman_truth, (1,1,)+cameraman_truth.shape)
cameraman_noisy = cameraman_truth + noise_level * np.random.rand(*cameraman_truth.shape) # Add noise
cameraman_estimate = np.copy(cameraman_noisy)
loss_fct_GD = np.zeros([nb_it,])
for it in range(nb_it): # A simple sub-gradient descent algorithm for image denoising
tv, G = pytv.tv_GPU.tv_hybrid(cameraman_estimate)
cameraman_estimate += - step_size * ((cameraman_estimate - cameraman_noisy) + regularization * G)
loss_fct_GD[it] = 0.5 * np.sum(np.square(cameraman_estimate - cameraman_noisy)) + regularization * tv
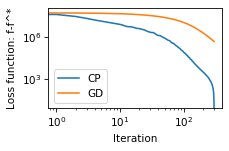
Accelerated convergence using gradient operators
Because the loss function with total variation is non-smooth, it is challenging the achieve sufficient convergence with the gradient descent algorithm. Instead, the primal-dual algorithm from Chambolle and Pock (https://doi.org/10.1007/s10851-010-0251-1) achieves faster convergence. The ADMM algorithm can also be used. To enable easy implementation of such proximal-based algorithm, the calculations of image gradients are available in PyTV-4D. A simple example is presented below in the case of the denoising of the cameraman image:
# A simple version of the Chambolle & Pock algorithm for image denoising
# Ref: Chambolle, Antonin, and Thomas Pock. "A first-order primal-dual algorithm for convex problems with applications to imaging." Journal of mathematical imaging and vision 40.1 (2011): 120-145.
sigma_D = 0.5
sigma_A = 1.0
tau = 1 / (8 + 1)
for it in range(nb_it):
# Dual update
dual_update_fidelity = (dual_update_fidelity + sigma_A * (cameraman_estimate - cameraman_noisy))/(1.0+sigma_A)
D_x = pytv.tv_operators_GPU.D_hybrid(cameraman_estimate)
prox_argument = dual_update_TV + sigma_D * D_x
dual_update_TV = prox_argument / np.maximum(1.0, np.sqrt(np.sum(prox_argument**2, axis = 1)) / regularization)
# Primal update
cameraman_estimate = cameraman_estimate - tau * dual_update_fidelity - tau * pytv.tv_operators_GPU.D_T_hybrid(dual_update_TV)
# Loss function update
loss_fct_CP[it] = 0.5 * np.sum(np.square(cameraman_estimate - cameraman_noisy)) + regularization * pytv.tv_operators_GPU.compute_L21_norm(D_x)
Functions overview
PyTV-4D provides the following functions:
- Direct CPU and GPU, for quick (sub)-gradient descent algorithms:
use_GPU = True
import numpy as np
if use_GPU:
import pytv.tv_GPU as tv
else:
import pytv.tv_CPU as tv
Nz, M, N = 20, 4, 100 # 4D Image dimensions. M is for time.
np.random.seed(0)
img = np.random.rand(Nz, M, N, N)
# TV values, and sub-gradient arrays
tv1, G1 = tv.tv_upwind(img)
tv2, G2 = tv.tv_downwind(img)
tv3, G3 = tv.tv_central(img)
tv4, G4 = tv.tv_hybrid(img)
- CPU and GPU operators, useful for proximal algorithms:
use_GPU = True
import numpy as np
if use_GPU:
import pytv.tv_operators_GPU as tv
else:
import pytv.tv_operators_CPU as tv
Nz, N = 10, 100 # Image size
M = 2 # Time size
reg_time = 2**(-5) # Time regularization (lambda_t)
img = np.random.rand(Nz, M, N, N)
# Discrete gradient: D_img has size (Nz, Nd, M, N, N) where Nd is the number of difference terms
D_img1 = tv.D_upwind(img, reg_time = reg_time)
D_img2 = tv.D_downwind(img, reg_time = reg_time)
D_img3 = tv.D_central(img, reg_time = reg_time)
D_img4 = tv.D_hybrid(img, reg_time = reg_time)
# Transposed discrete gradient: D_T_D_img has size (Nz, M, N, N)
D_T_D_img1 = tv.D_T_upwind(D_img1, reg_time = reg_time)
D_T_D_img2 = tv.D_T_downwind(D_img2, reg_time = reg_time)
D_T_D_img3 = tv.D_T_central(D_img3, reg_time = reg_time)
D_T_D_img4 = tv.D_T_hybrid(D_img4, reg_time = reg_time)
# TV values: obtained by computing the L2,1 norm of the image gradient D(img)
tv1 = tv.compute_L21_norm(D_img1)
tv2 = tv.compute_L21_norm(D_img2)
tv3 = tv.compute_L21_norm(D_img3)
tv4 = tv.compute_L21_norm(D_img4)
TV definition
Comments
- The (Nz, M, N, N) data order is prefered to (M, Nz, N, N) since the CT operations can be decomposed easily along z for parallel beam configurations.
- Time discretization in the operator forms: the discretization scheme used along the time direction is the same as the spatial scheme for each discretization. For the
centralscheme that require M>2, theupwindscheme is used instead for the time discretization for cases with M=2.
Cite
Please refer to the following article in your publications if you use PyTV-4D for your research:
@article{boigne2022towards,
author={Boign{\'e}, Emeric and Parkinson, Dilworth Y. and Ihme, Matthias},
journal={{IEEE Transactions on Computational Imaging}},
title={{Towards data-informed motion artifact reduction in quantitative CT using piecewise linear interpolation}},
year={2022},
volume={8},
pages={917-932},
doi={10.1109/TCI.2022.3215096}
}
License
PyTV-4D is open source under the GPLv3 license.
To do
- Replace mask_static, factor_reg_static with a weight matrix of size Nz x M x N x N that is passed directly onto all functions
- Implement pytv for non-square images
- In 2D, write function to match the
denoise_tv_chambollefunction from scikit-image with a PyTV-4D algorithm.