Matrice 300 RTK OSDK not working
We just got our Matrice 300, the OSDK and the Manifold 2-C. We are trying to integrate everything and get it work with ROS.
- Matrice 300 rtk
- Manifold 2-C
- Ubuntu 16.04
- ROS Kinetic
- DJI Onboard SDK ROS 4.1.0
We connected Matrice with (OSDK) and (OSDK with the Manifold) by following the instructions from the user manual. The Manifold can not be powered on together with the Metrice. The power output from the OSDK is around 300mV which is supposed to be 24V. We also tried to power the Manifold with the external power and connect to the OSDK to see if it can get data from Matrice by launching ros launch files. We changed the UserConfig.txt and the dji_vehicle_node.launch accordingly. But when we launch the dji_vehicle_node.launch, we got the "Linker channel Init Vehicle Failed" error, even when the devices were connected via USB. Here is the log:
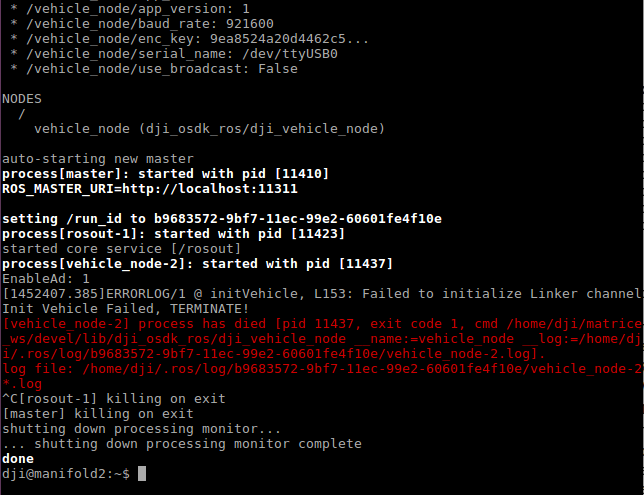
We checked our /dev/, the /dev/ttyUSB0 and /dev/ttyACM0 were not listed there. How can we know the OSDK is powered/working?
Agent comment from DJI SDK in Zendesk ticket #61086:
尊敬的开发者,感谢您联系DJI 大疆创新
由于github不是我们主要的咨询渠道,您的问题可能跟进不及时。我们建议您通过填写表单( https://djisdksupport.zendesk.com/hc/zh-cn/requests/new )向我们反馈问题。或者您也可以在论坛发帖,与其它开发者交流。论坛链接:https://djisdksupport.zendesk.com/hc/zh-cn/community/topics
Dear developer, thank you for contacting DJI.
Since github is not our main consultation channel, your questions may not be followed up in time. We recommend that you fill in the form (https://djisdksupport.zendesk.com/hc/en-us/requests/new) to report problems to us. Or you can post in the forum to communicate with other developers. Forum link: https://djisdksupport.zendesk.com/hc/zh-cn/community/topics
°°°
Agent comment from kyle.cai in Zendesk ticket #61086:
Dear developer ,
Thank you for contacting DJI.
Log shows that the seriel port initial failed!

Please check the serial port configuration. And for Manifold 2C, there is only one serial port UART0 for debug port, suggest to use a USB-TLL cable, and the serial name can be set to /dev/ttyUSB0.

Thank you for your understanding and support, hope you have a nice day.
Best Regards,
DJI SDK Support Team
image.png
image.png
°°°