dont run domWalker on scroll
Problem:
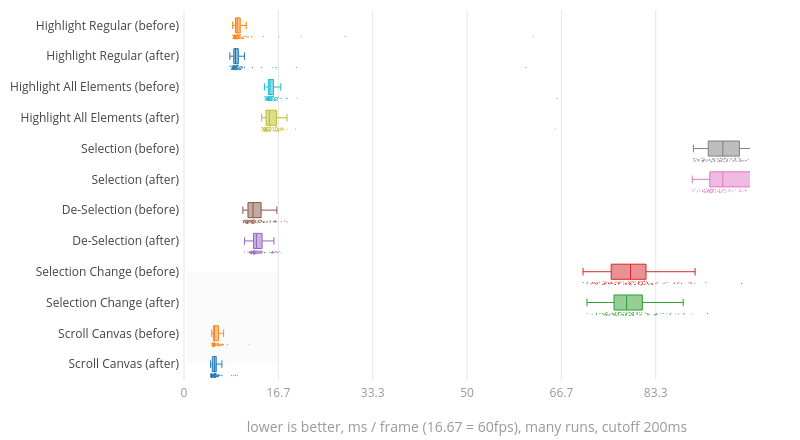
When we scroll the canvas, we always trigger the domWalker, since the check for nothingChanged always returns false (even though it's just the canvas coordinates)
Fix:
This is the first fix for this. The simplest fix is to have a special case for SCROLL_CANVAS action - where the domWalker doesn't need to run.
** Note: **
A more complex fix can be to have the actions themselves state whether they need the domWalker to run or not - or have another flag in addition to nothingChanged that checks only for domWalker relevant changes.
Manual Tests: I hereby swear that:
- [X] I opened a hydrogen project and it loaded
- [X] I could navigate to various routes in Preview mode
#12002 Bundle Size — 62.35MiB (~+0.01%).
042f2a7(current) vs 6339ece master#11995(baseline)
[!WARNING] Bundle contains 58 duplicate packages – View duplicate packages
Bundle metrics 
2 changes 
1 regression
| Current #12002 |
Baseline #11995 |
|
|---|---|---|
45.44MiB(~+0.01%) |
45.44MiB |
|
0B |
0B |
|
20.95% |
20.93% |
|
31 |
31 |
|
34 |
34 |
|
4371 |
4371 |
|
503 |
503 |
|
30.81% |
30.81% |
|
467 |
467 |
|
58 |
58 |
Bundle size by type 2 changes 1 regression 
1 improvement
| Current #12002 |
Baseline #11995 |
|
|---|---|---|
62.34MiB (~+0.01%) |
62.34MiB |
|
10.94KiB (-0.34%) |
10.98KiB |
Bundle analysis report Branch fix/scroll-performance Project dashboard