POC semantic segmentation
This PR is intended to open a discussion rather than a merging-ready PR, although most of the heavy-lifting: OpenGL, math has implemented.
https://user-images.githubusercontent.com/60384727/177585341-b5b9bdca-99b8-40e6-8936-4c12533f67d0.mov
This PR introduces a bare minimum requirement to assign point-level labels using 3D bounding boxes for training semantic segmentation models. Is this something of interest?
If so, there are some open questions:
- How do we store/ load point-labels? Open3D PointCloud class doesn't support label storage? As a separate numpy file?
- Switch between object detection and semantic segmentation modes or use the same UI for both tasks
- To store and color the points, we need to know the distinct label upfront but currently, the box class is a free edit box. Should we change it to a drop-down list where users can define the labels in config.ini?
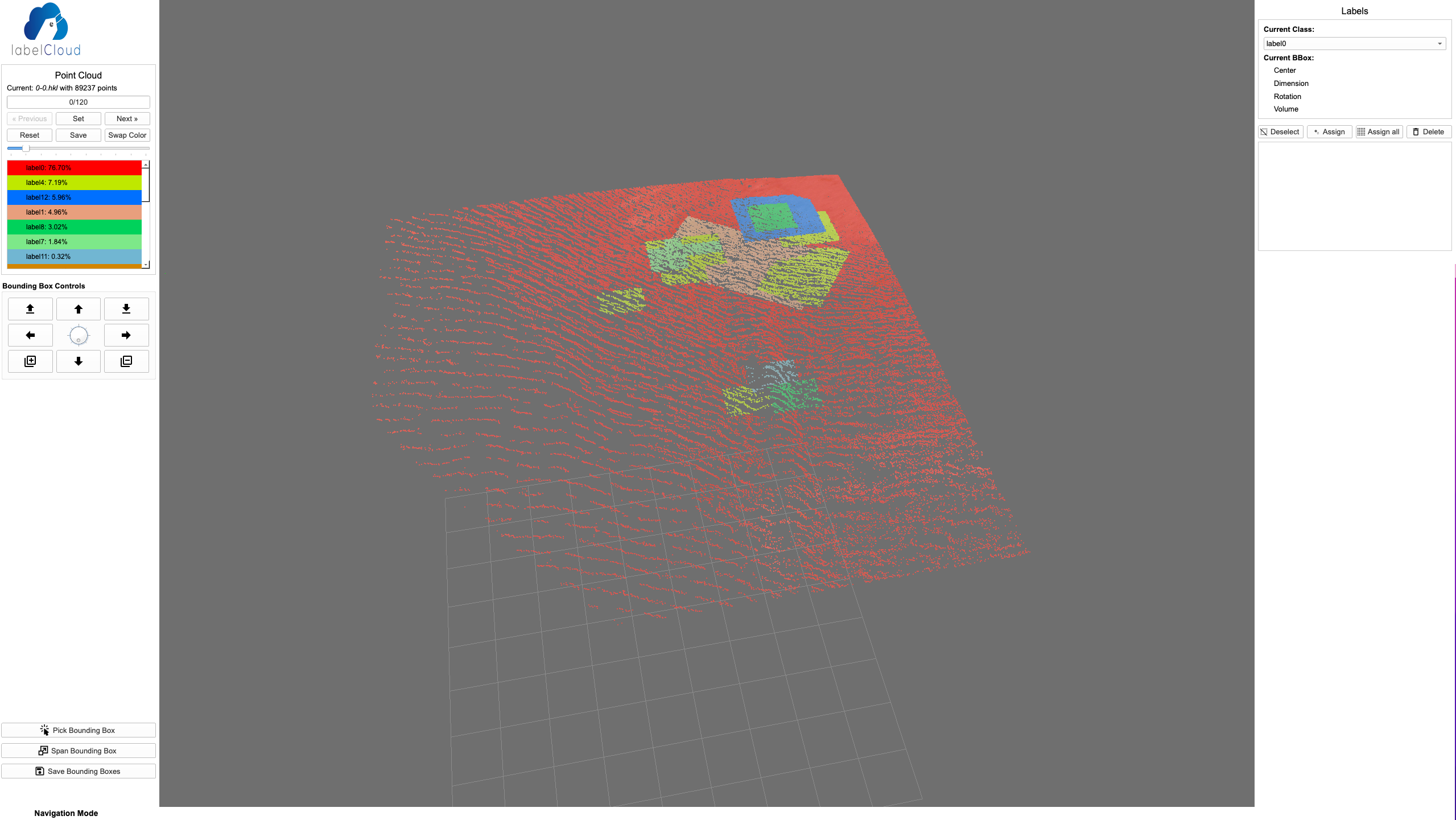
- How should the UI look like for the semantic segmentation mode. Below is my suggested UI, the notable differences are as follows:
- Three more buttons for swapping colors, resetting the labels and saving the labels
- A color list of labels and the number of points in each label
- Change the box label list to a drop-down list
- Two more buttons to assign points to the boxes if they are inside them.
Please let me know what you think :)
Suggested UI
Hi @chingyulin,
thank you for the PR and sorry for the late response (I wanted to look at the code first but did not find the time yet!).
In general: I like the idea of supporting point segmentation via bounding boxes.
I think the first step should be supporting the export via postprocessing and optional coloring.
Can you name common label formats for point segmentation?
For the further steps, I think they should not bloat the normal object detection (bounding box only) mode if they don't add value there.
However, we could show these controls only on activation of a "segmentation mode".
What do you think.
(Will reply to the code as soon as I find the time!)
Best,
Christoph
Hi @ch-sa,
Thanks for the response.
Regarding the common label formats for point segmentation, I did a quick search (SemanticKitti, S3DIS) and they don't use the same label format. In Open3D-ML, they represent labels together with the point cloud features (positions and colors) as a numpy array. I suggest we can follow this format so the labeled result can be easily used together with Open3D-ML. What do you think? If it's ok for you, I can start the implementation.
I agree that we should not float the normal bounding box mode. I can make a field in the config to activate the "segmentation mode".
Best,
Ching-yu
Hi again,
I tried your branch and works already quite nice. From your code I see that you create an additional "label color" VBO so the original colors remain untouched, which is good and needed in case a user aligns and exports a point cloud.
As this a rather large change I created a new feature branch feature/semantic-segmentation and would propose that you merge into this one first.
This way you can provide smaller step-by-step pull requests and I could support you along the way.
So far you used a button for switching to the segmentation mode. I would rather see it as an option in the menu that can be activate/ checked, like this:

For the export format, I agree that we can start with that format (we can still add more later).
Simply add a new label manager (writers/ readers) by extending the Base: https://github.com/ch-sa/labelCloud/blob/master/labelCloud/io/labels/base.py
Some general hints for the code conventions:
- relative imports over absolute imports
- black formatting
- type hinting of parameters and return values
Best and looking forward,
Christoph