About KITTI format label
I want to know that how to make the transformation between velodyne coordinate and camera coordinate. I find that in the source code, the transformation is "centroid = (-centroid[1], centroid[2] + 2.3, centroid[0])" which means that camera coord velodyne coord x = -y y = z+2.3 z = x
I want to know why the transformation is defined like this. As I know that in KITTI dataset the coordinate are defined bellow: Camera: x = right, y = down, z = forward Velodyne: x = forward, y = left, z = up and they use callib data to transform the coordinate specifically.
Hello @deemoo-wang,
I think this question is best addressed to @sondisonda who provided this transformation as I asked the same question.
So afaik the 2.3m is the distance from floor to the camera but I would also like to have an official specification for this.
@ch-sa 3d bboxes locations in KITTI labels are given in camera frame (not LIDAR frame, unfortunately for us), so we have to calculate camera-to-lidar transformation manually for each pointcloud+label pair (using corresponding calib file).
My result with open3d (I can send code, if needed):
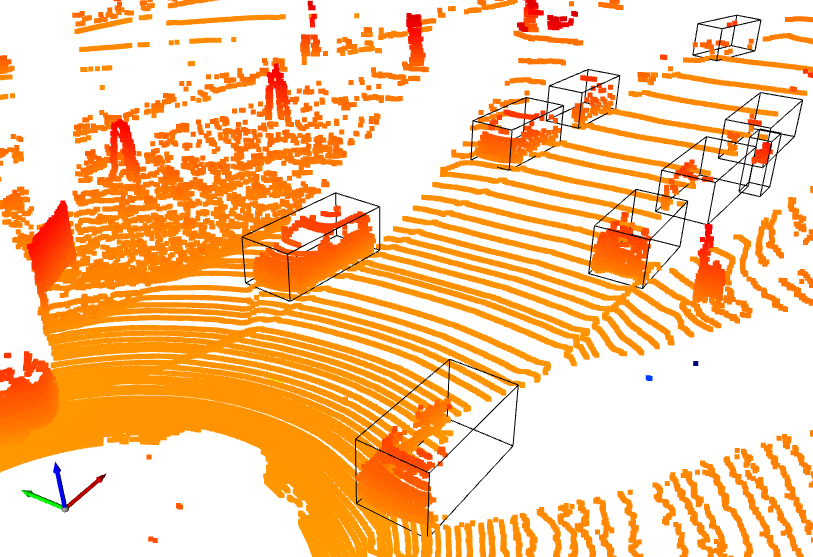
There are specific steps for each label:
- Get
R0_rectandTr_velo_to_camfields from corresponding calib file and convert + expand them up to transformation matrices (i.e. withnp.concatenatefunction) to make them (4x4) shape. Lets call themT_rectandT_v2crespectively. - Calculate lidar-to-camera transformation:
T_l2c = T_rect @ T_v2c. - Calculate camera-to-lidar transformation:
T_c2l = np.linalg.inv(T_l2c)(or more fancy inverse) - Extract 3d bbox location from label (lets call it
loc) and append ones to make it homogeneous:[x, y, z] -> [x, y, z, 1] - Transform 3d bbox location to lidar frame via our
T_c2l:loc = T_c2l @ loc. - Repeat 1-5 for each label+calib file pairs in dataset.
Note: the main idea is that camera-to-lidar transformation would be different for all clouds (cloud+label+calib), so having one hardcoded transformation for whole dataset (like it is now) is incorrect.
@Divelix thanks for the detailed clarification.
So basically we would need to support reading the calibration files for every point cloud, right?
Are you interested in creating a PR for this, I can support you in the integration once the base functions are there.
I probably won't find time to address this soon.
Best Christoph
@ch-sa I just created PR with solution, but I assumed that calib folder is always next to labels. It is probably better to add folder selection to config.ini or even settings section of GUI.
Great, will have a look at it tomorrow!
And I can then add the config option.
Do you have an example point cloud with calib and label file you could provide, so I can test?
@ch-sa Yes, there are first 11 samples from KITTI: kitti_10.zip. The last one (000010) is on my screenshot above.