virtualbow

virtualbow copied to clipboard
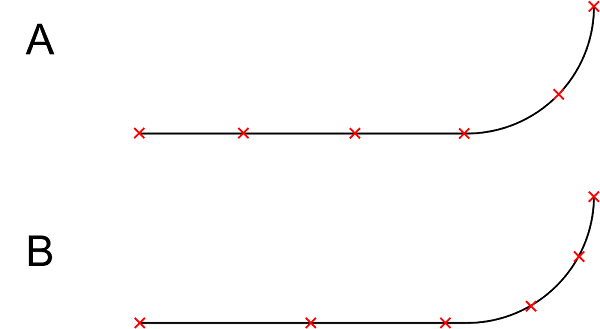
Variable limb element sizing
When implicit time integation is implemented (#211), the time step in dynamic analysis is no longer limited by the smallest element in the system (highest natural frequency). Therefore the size of the limb elements wouldn't have to be uniform anymore (A) but could be chosen according to the limb's geometry (B), i.e. smaller elements for areas of high curvature or change in cross section.
The algorithm for determining the element sizes will probably have to contain some empirical components. Maybe the Ramer–Douglas–Peucker algorithm combined with a minimum element size could be a good starting point.