calicam
 calicam copied to clipboard
calicam copied to clipboard
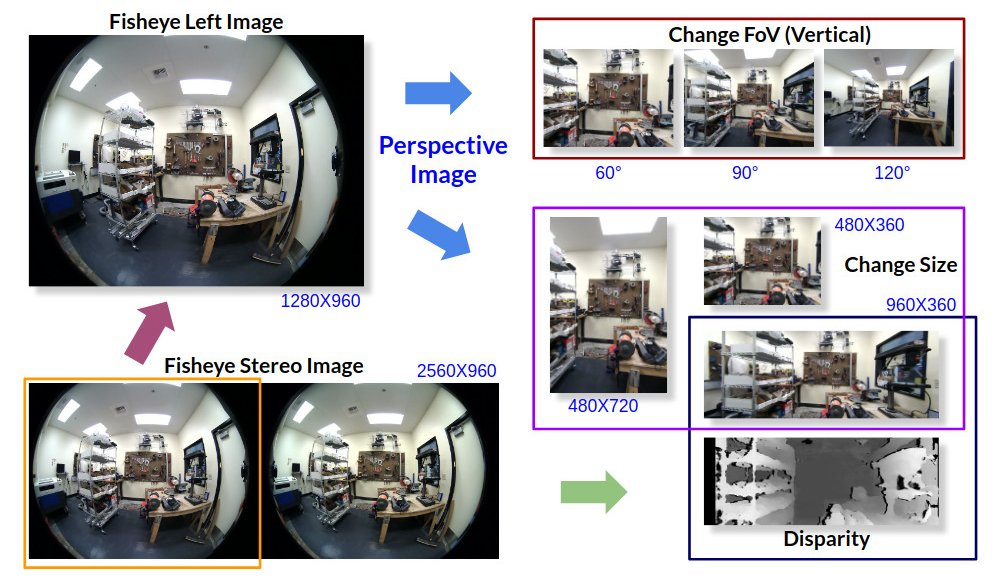
CaliCam: Calibrated Fisheye Stereo & Mono Camera
CaliCam: Calibrated Fisheye Stereo & Mono Camera
For more information see https://astar.ai.
Youtube Demo Video.
The following steps have been tested and passed on Ubuntu 16.04.
1. Theoretical Background
Fisheye Camera Model: C. Mei and P. Rives, Single View Point Omnidirectional Camera Calibration From Planar Grids, ICRA 2007.
2. OpenCV Dependencies
Required at leat 3.0. Tested with OpenCV 3.4.0.
3. Run C++ Code
Compile
mkdir build && cd build
cmake ..
make
Run
./calicam
4. Run Python Code
python calicam.py
5. Calibration Parameter File
To run CaliCam in the LIVE mode, you need to download the calibration parameter file from online. Each CaliCam stereo/mono camera has a UNIQUE parameter file. Please download the corresponding parameter file by following the instructions at https://astar.ai/collections/astar-products.
6. Operation
6.1 'Raw Image' window
There are 3 trackbars to adjust the vertical FoV, width, and height for the output image.
6.2 'Disparity Image' window
There are 2 trackbars to adjust the numDisparities and blockSize for OpenCV stereo matching functions.
6.3 Exit
Press 'q' or 'Esc' key to exit.
7. Live Mode
To run CaliCam in a live mode, please change the variable live to true:
bool live = true;
and run
./calicam YOUR_CALIBRATION_FILE.yml