Y
Y

Hi, sorry to bother you again. I find the test cases (**preset_testCases**, num_agents:10) you used. I run again using the checkpoint file([gym-collision-avoidance](https://github.com/mit-acl/gym-collision-avoidance)/[gym_collision_avoidance](https://github.com/mit-acl/gym-collision-avoidance/tree/release/gym_collision_avoidance)/[envs](https://github.com/mit-acl/gym-collision-avoidance/tree/release/gym_collision_avoidance/envs)/[policies](https://github.com/mit-acl/gym-collision-avoidance/tree/release/gym_collision_avoidance/envs/policies)/[GA3C_CADRL](https://github.com/mit-acl/gym-collision-avoidance/tree/release/gym_collision_avoidance/envs/policies/GA3C_CADRL)/[checkpoints](https://github.com/mit-acl/gym-collision-avoidance/tree/release/gym_collision_avoidance/envs/policies/GA3C_CADRL/checkpoints)/IROS18/network_01900000) you provided with vpref=1.0, DT=0.2. But it fails....
Hi, I find the results in your paper (GA3C-CADRL) are pretty good. And it surprises me that the results in Fig.6 (b)(c) is so perfect. 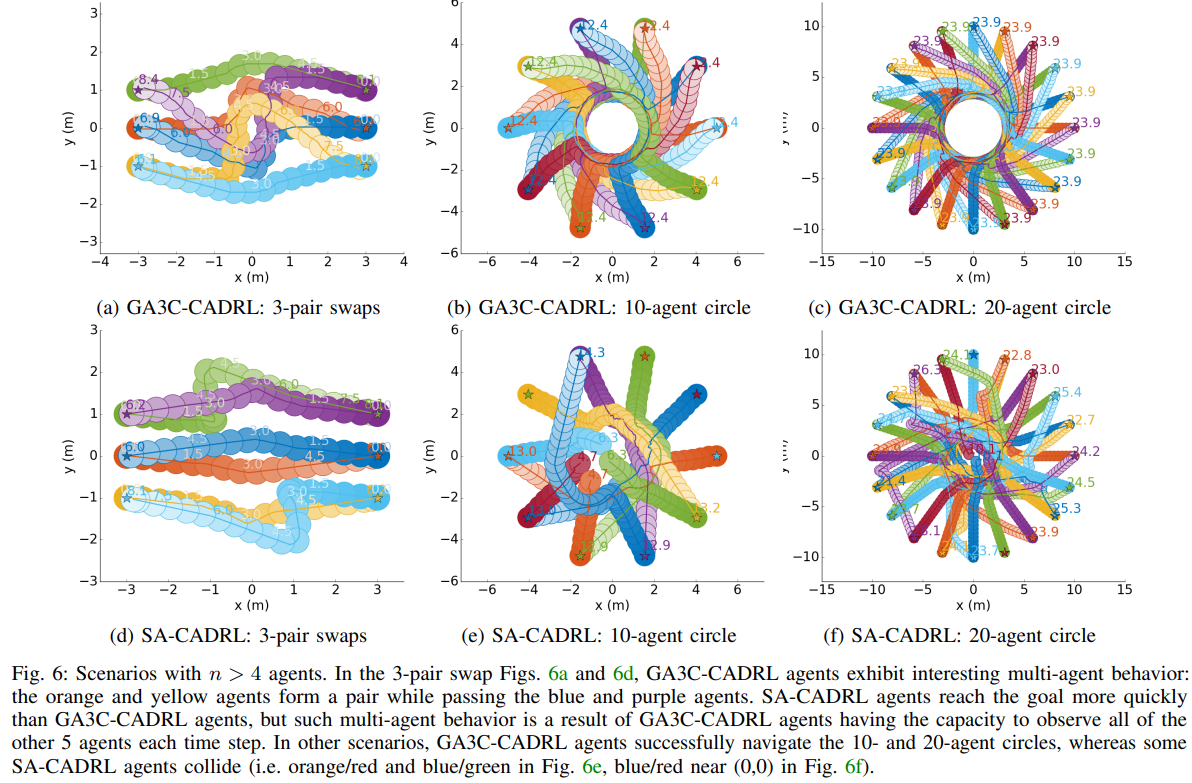 It seems that these...
**Describe the bug** connection fails **Console logs / stack traces** Connection to 172.23.24.185:10000 failed - System.NullReferenceException: Object reference not set to an instance of an object at Unity.Robotics.ROSTCPConnector.RosTopicState.OnConnectionEstablished (System.Net.Sockets.NetworkStream stream) ...
Hi, could you please help me? I've done all the installation and compilation, but I can't see any drones in rviz or gazebo (I can set up 2D Nav Goal)....
ERROR: cannot launch node of type [ego_planner/ego_planner_node]: Cannot locate node of type [ego_planner_node] in package [ego_planner]. Make sure file exists in package path and permission is set to executable (chmod...
python setup.py build ^[[A running build running build_ext -- The C compiler identification is GNU 8.4.0 -- The CXX compiler identification is GNU 8.4.0 -- Check for working C compiler:...
We are interested in understanding more about the **generalization capabilities** of your algorithm. Specifically, we have noticed that when testing in scenarios where the robot's position or the strategies of...
Hi, I noticed that all the demos are for static shape experiments. Could you please provide some ideas on how I could implement a deformable shape test?