ModelingToolkit.jl
 ModelingToolkit.jl copied to clipboard
ModelingToolkit.jl copied to clipboard
MTK -- weird solution with step inputs
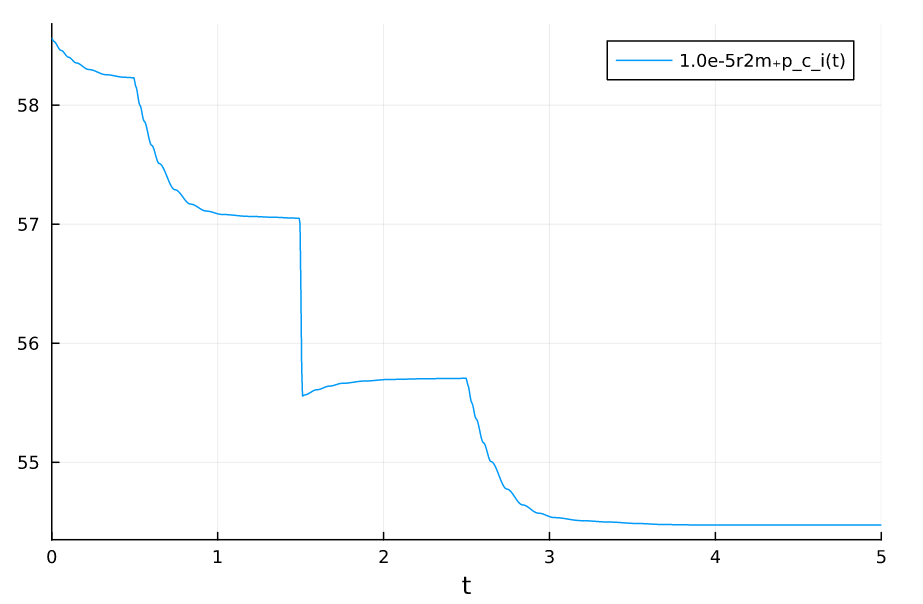
Frequently, MTK models exhibit weird/unphysical oscillatoric behavior when I use step inputs and default solvers:
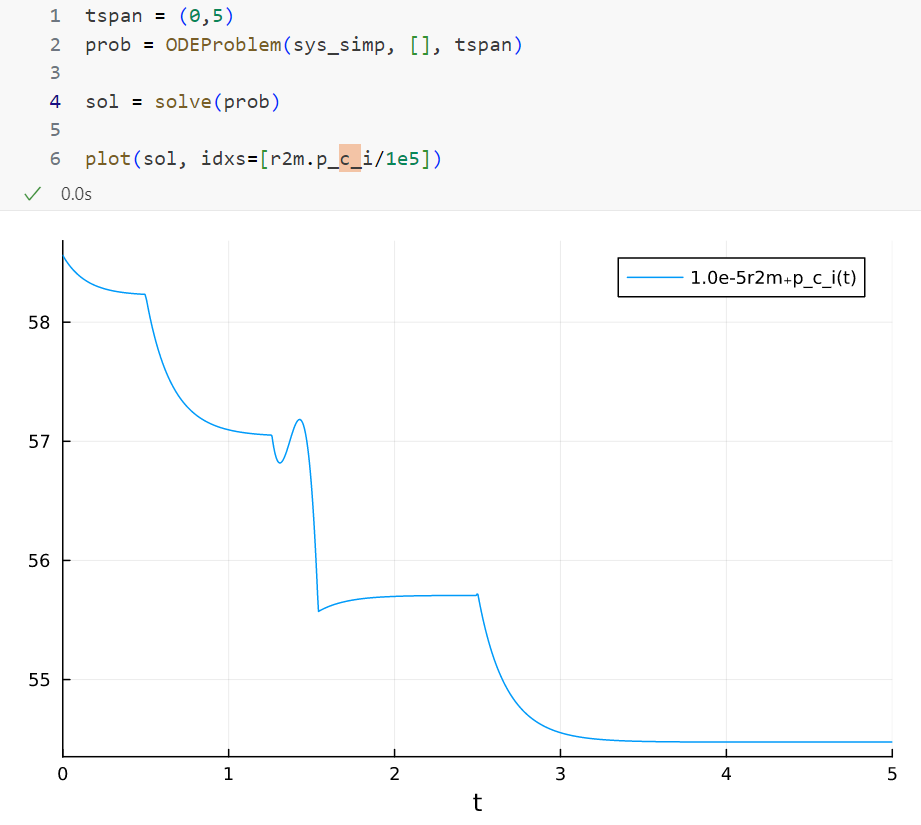
This plot uses input functions:
u_p_f(t) = t < 0.5 ? 220e5 : 0.95*220e5
u_p_m(t) = t < 1.5 ? 50e5 : 0.97*50e5
u_f_p(t) = t < 2.5 ? 60 : 0.95*60
u_χ_w(t) = 0.35
Observe that the oscillation starts prior to the temporal location of one of the step changes. It is as if a too infrequent sampling is used, in combination with the built-in interpolation of the solution.
I have tried to specify tstops at the location of the step changes, without any improvement. I have also tried to specify a high resolution saveat, without any improvement.
The displayed behavior shows up when I use the default solver. I have tried to specify other solvers. The solvers I typically end up with are the BDF solvers, e.g., QBDF. With this solver, I get a more realistic solution:
This solution is somewhat jagged; the solution gets better if I set reltol to 1e-4 or smaller.
- Question: what is the cause of this strange, oscillatory solution? Is there a way to fix it using the default solver?
If you need my code to figure out the problem (simplifies to one DE and one AE), I will be happy to share it.
If you need my code to figure out the problem (simplifies to one DE and one AE), I will be happy to share it.
Are you solving a DAEProblem as an ODEProblem?
The problem is a DAE, but I pose it as an ODESystem. Here is my code:
using ModelingToolkit
using DifferentialEquations
using Plots, LaTeXStrings
# Specifying line properties as constants makes it possible to globally
# change these values and keep consistency
LW1 = 2.5
LW2 = 1.5
LS1 = :solid
LS2 = :dash
LS3 = :dashdot
LC1 = :red
LC2 = :blue
LC3 = :green
LC4 = :orange
LA1 = 1
LA2 = 0.5
LA3 = 0.03
# Registering input functions. Defining independent variable, etc.
#
@variables t
Dt = Differential(t)
@register_symbolic u_p_f(t) # Reservoir formation pressure, Pa
@register_symbolic u_p_m(t) # Manifold pressure, Pa"
@register_symbolic u_f_p(t) # Pump rotational frequency, Hz
@register_symbolic u_χ_w(t) # Water cut, -
#
# Defining model constructor
function reservoir_2_manifold(; name)
pars = @parameters (PI=3.141592654, g=9.81, ℓ_m=100, ℓ_p=2_000, ℓ=ℓ_m+ℓ_p, h=ℓ, d=0.1569, A=PI*d^2/4, V=A*ℓ,
β_T=1/1.5e9, p_β0=1e5, ρ_o=900, ρ_w=1e3, ν_o=100e-6, ν_w=1e-6,
ϵ=45.7e-6, hˢ_p=1210.6, fˢ_p=60, V̇ˢ_p=1, a₁=-37.57, a₂=2.864e3, a₃=-8.668e4,
C_ṁ_v=25.9e3/3600, pˢ_v=1e5, ρˢ_v=1e3, C_V̇_pi=7e-4, pˢ_pi=1e5)
@variables t
Dt = Differential(t)
vars = @variables (V̇_v(t)=23.15e-3, ρ_β0(t), ν(t), μ(t), p_c_i(t)=58.5e5, p_h(t),
ṁ_v(t), ρ_v(t), v_v(t), Δp_p(t), Δp_f(t), h_p(t), f_D(t),
N_Re(t), Δp_g(t), p_f(t), p_m(t), f_p(t), χ_w(t))
#
eqs = [Dt(V̇_v) ~ A*(p_h - p_c_i + Δp_p - Δp_f - ρ_v*g*h)/(ρ_v*ℓ),
ρ_β0 ~ χ_w*ρ_w + (1-χ_w)*ρ_o,
ν ~ χ_w*ν_w + (1-χ_w)*ν_o,
μ ~ ρ_β0*ν,
ρ_v ~ ρ_β0*exp(β_T*(p_c_i-p_β0)),
p_h ~ p_f - pˢ_pi*V̇_v/C_V̇_pi,
ṁ_v ~ ρ_v*V̇_v,
p_c_i ~ p_m + pˢ_v*ρ_v/ρˢ_v*(ṁ_v/C_ṁ_v)^2,
h_p ~ hˢ_p*( (f_p/fˢ_p)^2 + a₁*(f_p/fˢ_p)*V̇_v/V̇ˢ_p
+ a₂*(V̇_v/V̇ˢ_p)^2 + a₃*(fˢ_p/f_p)*(V̇_v/V̇ˢ_p)^3),
Δp_p ~ ρ_v*g*h_p,
v_v ~ V̇_v/A,
N_Re ~ ρ_v*v_v*d/μ,
f_D ~ (-1/2/log10(5.74/N_Re^0.9 + ϵ/d/3.7))^2,
Δp_f ~ ℓ*f_D*ρ_v/2*v_v^2/d,
Δp_g ~ ρ_v*g*h]
#
return ODESystem(eqs, t, vars, pars; name)
end
# Defining the input functions
u_p_f(t) = t < 0.5 ? 220e5 : 0.95*220e5
u_p_m(t) = t < 1.5 ? 50e5 : 0.97*50e5
u_f_p(t) = t < 2.5 ? 60 : 0.95*60
u_χ_w(t) = 0.35
# Composing the system
@named r2m = reservoir_2_manifold()
connections = [r2m.p_f ~ u_p_f(t),
r2m.p_m ~ u_p_m(t),
r2m.f_p ~ u_f_p(t),
r2m.χ_w ~ u_χ_w(t)]
sys = compose(ODESystem(connections; name=:sys), r2m)
sys_simp = structural_simplify(sys)
# Simulating system. Plotting results
tspan = (0,5)
prob = ODEProblem(sys_simp, [], tspan)
sol = solve(prob) # This gives oscillatoric behavior
# sol = solve(prob, QBDF(), reltol=1e-5) # This gives the expected result
plot(sol, idxs=[r2m.p_c_i/1e5],lw=LW1, lc=LC1,
xlabel=L"$t$ [s]",ylabel=L"$p^\mathrm{i}_\mathrm{c}$ [bar]",label="",
title="R2M: Choke valve inlet pressure",
framestyle =:box, grid=true)
NOTE: the result is one differential equation, and one algebraic equation. A solver supporting mass matrix is needed.
In reality, it is possible to manually remove the algebraic equation and reduce the model to an index 0 DAE = an ODE. But structural_simplify doesn't do that. Possibly because of a square root that is involved.
https://docs.sciml.ai/DiffEqDocs/stable/solvers/dae_solve/#OrdinaryDiffEq.jl-(Mass-Matrix)
The standard Hermite interpolation used for ODE methods in OrdinaryDiffEq.jl is not applicable to the algebraic variables. Thus, for the following mass-matrix methods, use the interpolation (thus saveat) with caution if the default Hermite interpolation is used. All methods which mention a specialized interpolation (and implicit ODE methods) are safe.
Which solver is it giving you here? We should probably make sure that the default chosen is safe to this.
How can I check the chosen default solver?
From earlier work where I converted Modelica code to MTK, I observed the same thing. The code were implementations of cases I use in a course on "Modeling of Dynamic Systems" -- chemical engineering style (mass balance, momentum balance, energy balance), which I tend to pose as DAEs -- differential equations for balanced quantities, with the addition of necessary algebraic equations. Typically 1-3 differential equations + a number of algebraic equations.
In that case, I experimented with a lot of the solvers with mass matrix, and the only ones I was happy with were the BDF solvers; don't know exactly why I chose the QBDF solver.
From using OpenModelica, the default solvers there tend to work well.
sol.alg. this has nothing to do with the solution. It's just the interpolation on the algebraic variables as mentioned in the docs
Hm... the default solver seems to work now if I specify reltol=1e-5, just as I used with the QBDF algorithm. The behavior is very different with default reltol, though.
Here is the default sol.alg:
Rodas4{2, false, GenericLUFactorization{RowMaximum}, typeof(OrdinaryDiffEq.DEFAULT_PRECS), Val{:forward}, true, nothing}(GenericLUFactorization{RowMaximum}(RowMaximum()), OrdinaryDiffEq.DEFAULT_PRECS)
Note: in some previous examples I have tested, changing reltol did not help on the default solver.