ModelingToolkit.jl
 ModelingToolkit.jl copied to clipboard
ModelingToolkit.jl copied to clipboard
`ERROR: During the resolution of the non-linear system, the evaluation of the following equation(s) resulted in a non-finite number: [1, 3]`
So my student is building a model from MTK components based on the great Planarmechanics Modelica library.
simple model
One of our simpler test models is nothing but a planar pendulum which causes the error in the title. That model consists of
- a Fixed (fixed bearing),
- a Revolute (revolute joint),
- FixedTranslation (massless rod),
- a Body (rigid body),
- a Torque (torque source),
- a Constant (constant input)
Here's a sketch of the system:

code to reproduce the error
using ModelingToolkit, DifferentialEquations, LinearAlgebra
using GLMakie
@variables t
D= Differential(t)
##
# connectors
@connector function frame_a(;name, pos=[0., 0.], phi=0.0, _f=[0., 0.], tau=0.0)
sts = @variables ox(t)=pos[1] oy(t)=pos[2] phi(t) fx(t)=_f [connect=Flow] fy(t)=_f [connect=Flow] tau(t) [connect=Flow]
ODESystem(Equation[], t, sts, []; name=name)
end
@connector function flange_a(;name)
sts = @variables phi(t) tau(t) [connect=Flow]
ODESystem(Equation[], t, sts, []; name=name, defaults = Dict(phi => 0.0, tau => 0.0))
end
@connector function realInput(;name, x=0.0)
sts = @variables x(t) [input=true]
ODESystem(Equation[], t, sts, []; name=name)
end
@connector function realOutput(;name, x=0.0)
sts = @variables x(t) [output=true]
ODESystem(Equation[], t, sts, []; name=name)
end
##
# components
function Fixed(;name, pos=[0., 0.], phi=0.0)
@named fa = frame_a()
ps = @parameters posx=pos[1] posy=pos[2] phi=phi
eqs = [
fa.ox ~ posx
fa.oy ~ posy
fa.phi ~ phi
]
compose(ODESystem(eqs, t, [], ps; name=name), fa)
end
function Revolute(;name, phi=0.0, w=0.0, z=0.0, tau=0.0)
@named fa= frame_a()
@named fb= frame_a()
@named fla= flange_a()
sts= @variables phi(t)=phi w(t)=w z(t)=z tau(t)=tau
eqs= [ D.(phi) ~ w
D.(w) ~ z
fla.phi ~ phi
fla.tau ~ tau
fa.ox ~ fb.ox
fa.oy ~ fb.oy
fa.phi + phi ~ fb.phi
fa.fx + fb.fx ~ 0
fa.fy + fb.fy ~ 0
fa.tau + fb.tau ~ 0
fa.tau ~ tau
]
compose(ODESystem(eqs, t, sts, []; name=name), [fa,fb,fla])
end
function FixedTranslation(;name, r0 =[1. , 0.])
@named fa= frame_a()
@named fb= frame_a()
ps= @parameters rx=r0[1] ry=r0[2]
sts= @variables r0x(t) r0y(t) Rx(t) Rp(t) Ry(t) Rq(t)
eqs= [
Rx ~ cos(fa.phi)
Rp ~ -sin(fa.phi)
Ry ~ sin(fa.phi)
Rq ~ cos(fa.phi)
Rx * rx + Rp * ry ~ r0x
Ry * rx + Rq * ry ~ r0y
fa.ox + r0x ~ fb.ox
fa.oy + r0y ~ fb.oy
fa.phi ~ fb.phi
fa.fx + fb.fx ~ 0
fa.fy + fb.fy ~ 0
fa.tau + fb.tau + r0x * fb.fy - r0y * fb.fx ~ 0
]
compose(ODESystem(eqs, t, sts, ps; name=name), [fa,fb])
end
function Body(;name, v=[0., 0.], a=[0., 0.],phi=0.0, w=0.0, z=0.0)
@named fa = frame_a()
ps = @parameters m=1.0 I=1.0
sts= @variables vx(t)=v[1] vy(t)=v[2] ax(t) ay(t) phi(t)=0.0 w(t)=w z(t)=z
eqs = [fa.tau ~ I * z
D.(fa.ox) ~ vx
D.(fa.oy) ~ vy
D.(vx) ~ ax
D.(vy) ~ ay
D.(phi) ~ w
D.(w) ~ z
fa.phi ~ phi
fa.fx ~ m * ax
fa.fy ~ m * ay ]
compose(ODESystem(eqs, t, sts, ps; name=name), fa)
end
function Torque(;name)
@named in = realInput()
@named flb = flange_a()
eqs = [-in.x ~ flb.tau,]
compose(ODESystem(eqs, t, [],[]; name=name), [flb,in])
end
function Constant(;name, k=1.0)
@named y = realOutput()
ps = @parameters k=k
eqs = [
y.x ~ k
]
compose(ODESystem(eqs, t, [],ps; name=name), y)
end
##
# the actual model
@named fixed = Fixed()
@named revolute = Revolute()
@named trans = FixedTranslation()
@named body = Body()
@named torque = Torque()
@named const_ = Constant(k=1)
eqs = [
connect(fixed.fa, revolute.fa),
connect(revolute.fb, trans.fa),
connect(trans.fb, body.fa),
connect(torque.flb, revolute.fla),
connect(const_.y, torque.in)
]
@named model = compose(
ODESystem(eqs, t, name=:tmp),
[
fixed,
revolute,
trans,
body,
torque,
const_
]
)
modelTorque = model
sys = structural_simplify(model)
##
u0 = [
# instantly crashing parametrization for trans
trans.rx => 1.0,
trans.ry => 0.0,
# initially working parametrization for trans (until t ~ sqrt(2*pi), i.e. until the pendulum has rotated by pi/2)
#trans.rx => 1/sqrt(2),
#trans.ry => 1/sqrt(2),
# supposedly sufficient initial conditions
body.phi => 0.0,
D(body.phi) => 0.0,
# initial conditions required by MTK
D(D(body.fa.oy)) => 1.0,
D(D(trans.r0x)) => 0.0,
trans.r0y => 0.0,
D(trans.r0y) => 0.0,
]
prob = ODEProblem(sys, u0, (0, 10.0))
sol = solve(prob, Rodas4())
fig = Figure()
ax = Axis(fig[1, 1])
lines!(ax, sol.t, sol[D(D(body.fa.oy))])
display(fig)
observations
Search the code for "u0 =", where we set our initial conditions/states and parameters.
- if the code stays as it is, it leads to the error mentioned above
- the equations that form the unsolvable non-linear system
> full_equations(sys)[1]Differential(t)(trans₊r0y(t)) ~ trans₊r0yˍt(t)
> full_equations(sys)[3]0 ~ (trans₊rx*sin(body₊phi(t)) - trans₊r0y(t)) / trans₊ry + cos(body₊phi(t))
- the issue seems to be that eq. 3 includes a division by parameter
trans₊ry, which can be0.- this can be verified by uncommenting the 2 lines below
# initially working parametrization [...] - however, then the model crashes a bit later after ~
sqrt(2*pi)seconds (i.e. after a rotation bypi)
- this can be verified by uncommenting the 2 lines below
- Apparently, the model has been transformed in a very unfortunate manner
- What can be done about this?
- the equations that form the unsolvable non-linear system
- the model requires a.. surprising and redundant set of initial conditions
- it requires the lines below
# initial conditions required by MTK- otherwise, we're greeted by a
ERROR: ArgumentError: SymbolicUtils.Symbolic{Real}[body₊fa₊oyˍtt(t)] are missing from the variable map.where the list of missing symbols grows as you comment out more "required" initial conditions.
- otherwise, we're greeted by a
- theoretically, the 2 lines below
# supposedly sufficient initial conditionsshould be enough to specify the (control theoretical) system state - Is there any solution to this?
- it requires the lines below
- Could you try
structural_simplify(model, allow_symbolic=false)? - I am curious, would Modelica tools still work when
trans₊ry = trans₊rx = 0? Dummy derivatives likebody₊fa₊oyˍttdon't need an initial condition but an initial guess, so it can just be set to any reasonable value and the solver will figure it out numerically. We could default them to zero.
- Can't see changes with
allow_symbolic=false. - I just built the same system in Modelica and simulated it using Dymola. The simple case with
trans₊ry != trans₊rxof course runs fine no matter the revolute joint angle. However, fortrans₊ry = trans₊rx = 0, I get a similar error (basically "division by zero").
The main difference I suspect is that MTK chooses, well, unfortunate continuous states like translational positions/velocities. For this choice, MTK would need to support dynamic state selection. I can't really test this hypothesis because... I don't know how to tell "dynamic states" from the other states(model) that MTK reports.
On the other hand the Modelica tool I used just chose an angle and its derivative, effectively sidestepping the problem.
Is there any working way I could hint MTK to prefer certain variables for state selection?
Ah, I mistyped it. I meant to write allow_parameter=false.
On the other hand the Modelica tool I used just chose an angle and its derivative, effectively sidestepping the problem. Is there any working way I could hint MTK to prefer certain variables for state selection?
Yes yes, you can write
@variables a(t) [state_priority = 100]
to tell the stat selection to prefer a.
allow_parametertrue> states(sys) 6-element Vector{Any}: trans₊r0y(t) trans₊r0yˍt(t) body₊w(t) body₊phi(t) body₊fa₊oyˍtt(t) trans₊r0xˍtt(t)false> states(sys) 6-element Vector{Any}: trans₊r0y(t) trans₊r0yˍt(t) body₊w(t) body₊phi(t) body₊fa₊oyˍtt(t) body₊phiˍtt(t)- this doesn't solve the issue though. new error:
ERROR: During the resolution of the non-linear system, the evaluation of the following equation(s) resulted in a non-finite number: [3]> equations(sys)[3] 0 ~ trans₊r0y(t) - trans₊rx*trans₊Ry(t) - trans₊ry*trans₊Rq(t)
[state_priority = 100]: good news- tried around a bit. issue would persist if applied to angle and angular rate of
trans. issue was solved after application tobody's angle and angular rate. (only works withallow_parameter = false) - redundant state
body.z, which however needn't be included inu0, remains:
> states(sys) 3-element Vector{Any}: body₊phi(t) body₊w(t) body₊z(t)- tried around a bit. issue would persist if applied to angle and angular rate of
working code
using ModelingToolkit, DifferentialEquations, LinearAlgebra
using GLMakie
@variables t
D= Differential(t)
##
# connectors
@connector function frame_a(;name, pos=[0., 0.], phi=0.0, _f=[0., 0.], tau=0.0)
sts = @variables ox(t)=pos[1] oy(t)=pos[2] phi(t) fx(t)=_f [connect=Flow] fy(t)=_f [connect=Flow] tau(t) [connect=Flow]
ODESystem(Equation[], t, sts, []; name=name)
end
@connector function flange_a(;name)
sts = @variables phi(t) tau(t) [connect=Flow]
ODESystem(Equation[], t, sts, []; name=name, defaults = Dict(phi => 0.0, tau => 0.0))
end
@connector function realInput(;name, x=0.0)
sts = @variables x(t) [input=true]
ODESystem(Equation[], t, sts, []; name=name)
end
@connector function realOutput(;name, x=0.0)
sts = @variables x(t) [output=true]
ODESystem(Equation[], t, sts, []; name=name)
end
##
# components
function Fixed(;name, pos=[0., 0.], phi=0.0)
@named fa = frame_a()
ps = @parameters posx=pos[1] posy=pos[2] phi=phi
eqs = [
fa.ox ~ posx
fa.oy ~ posy
fa.phi ~ phi
]
compose(ODESystem(eqs, t, [], ps; name=name), fa)
end
function Revolute(;name, phi=0.0, w=0.0, z=0.0, tau=0.0)
@named fa= frame_a()
@named fb= frame_a()
@named fla= flange_a()
sts= @variables phi(t)=phi w(t)=w z(t)=z tau(t)=tau
eqs= [ D.(phi) ~ w
D.(w) ~ z
fla.phi ~ phi
fla.tau ~ tau
fa.ox ~ fb.ox
fa.oy ~ fb.oy
fa.phi + phi ~ fb.phi
fa.fx + fb.fx ~ 0
fa.fy + fb.fy ~ 0
fa.tau + fb.tau ~ 0
fa.tau ~ tau
]
compose(ODESystem(eqs, t, sts, []; name=name), [fa,fb,fla])
end
function FixedTranslation(;name, r0 =[1. , 0.])
@named fa= frame_a()
@named fb= frame_a()
ps= @parameters rx=r0[1] ry=r0[2]
sts= @variables r0x(t) r0y(t) Rx(t) Rp(t) Ry(t) Rq(t)
eqs= [
Rx ~ cos(fa.phi)
Rp ~ -sin(fa.phi)
Ry ~ sin(fa.phi)
Rq ~ cos(fa.phi)
Rx * rx + Rp * ry ~ r0x
Ry * rx + Rq * ry ~ r0y
fa.ox + r0x ~ fb.ox
fa.oy + r0y ~ fb.oy
fa.phi ~ fb.phi
fa.fx + fb.fx ~ 0
fa.fy + fb.fy ~ 0
fa.tau + fb.tau + r0x * fb.fy - r0y * fb.fx ~ 0
]
compose(ODESystem(eqs, t, sts, ps; name=name), [fa,fb])
end
function Body(;name, v=[0., 0.], a=[0., 0.],phi=0.0, w=0.0, z=0.0)
@named fa = frame_a()
ps = @parameters m=1.0 I=1.0
sts= @variables vx(t)=v[1] vy(t)=v[2] ax(t) ay(t) phi(t)=0.0 [state_priority = 100] w(t)=w [state_priority = 100] z(t)=z
eqs = [fa.tau ~ I * z
D.(fa.ox) ~ vx
D.(fa.oy) ~ vy
D.(vx) ~ ax
D.(vy) ~ ay
D.(phi) ~ w
D.(w) ~ z
fa.phi ~ phi
fa.fx ~ m * ax
fa.fy ~ m * ay ]
compose(ODESystem(eqs, t, sts, ps; name=name), fa)
end
function Torque(;name)
@named in = realInput()
@named flb = flange_a()
eqs = [-in.x ~ flb.tau,]
compose(ODESystem(eqs, t, [],[]; name=name), [flb,in])
end
function Constant(;name, k=1.0)
@named y = realOutput()
ps = @parameters k=k
eqs = [
y.x ~ k
]
compose(ODESystem(eqs, t, [],ps; name=name), y)
end
##
# the actual model
@named fixed = Fixed()
@named revolute = Revolute()
@named trans = FixedTranslation()
@named body = Body()
@named torque = Torque()
@named const_ = Constant(k=1)
eqs = [
connect(fixed.fa, revolute.fa),
connect(revolute.fb, trans.fa),
connect(trans.fb, body.fa),
connect(torque.flb, revolute.fla),
connect(const_.y, torque.in)
]
@named model = compose(
ODESystem(eqs, t, name=:tmp),
[
fixed,
revolute,
trans,
body,
torque,
const_
]
)
modelTorque = model
sys = structural_simplify(model, allow_parameter=false)
u0 = [
# now works
trans.rx => 1.0,
trans.ry => 0.0,
# this as well
#trans.rx => 1/sqrt(2),
#trans.ry => 1/sqrt(2),
# slim initial conditions
body.phi => 0.0,
body.w => 0.0
# despite being part of states(sys), body.z needn't be set here
]
saveat = LinRange(0, 4.5, 2^7)
prob = ODEProblem(sys, u0, (saveat[1], saveat[end]))
sol = solve(prob, Rodas4(), saveat=saveat)
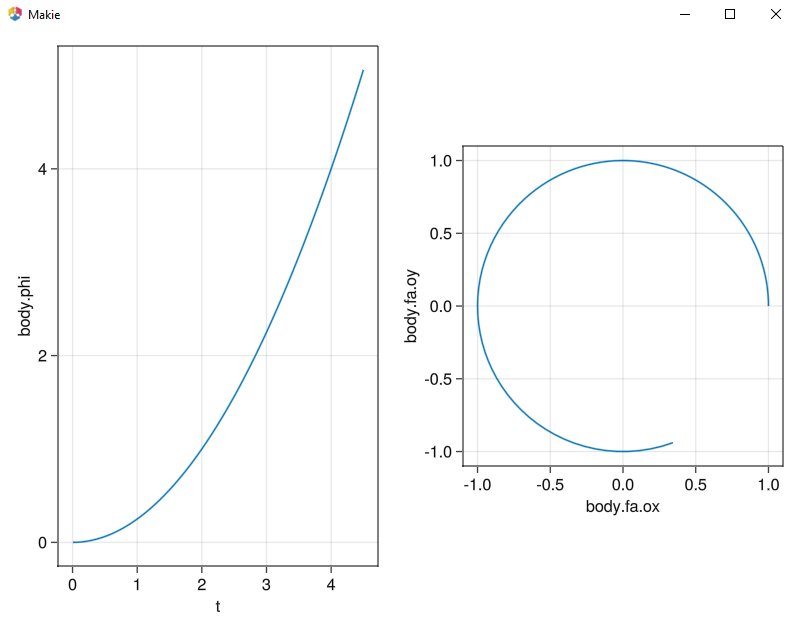
fig = Figure()
ax1 = Axis(fig[1, 1], xlabel="t", ylabel="body.phi")
lines!(ax1, sol.t, sol[body.phi])
ax2 = Axis(fig[1, 2], xlabel="body.fa.ox", ylabel="body.fa.oy", aspect=DataAspect())
lines!(ax2, sol[body.fa.ox], sol[body.fa.oy])
display(fig)
generated figure
Is this initialization? This seems like a state priority / dummy derivative thing? @YingboMa