summit_xl_sim
 summit_xl_sim copied to clipboard
summit_xl_sim copied to clipboard
Published
20 hours ago •
 RobotnikAutomation
RobotnikAutomation
Output odom response does not match the step input
We are trying to move the SUMMIT XL in a straight line in gazebo. The differential drive plugin for wheel joints is enabled and we gave a step input velocity to robot and observed the output response from \odom topic.
There are sudden dips/ falls in the output responses for a small period of time. The output response and step input are shown below:
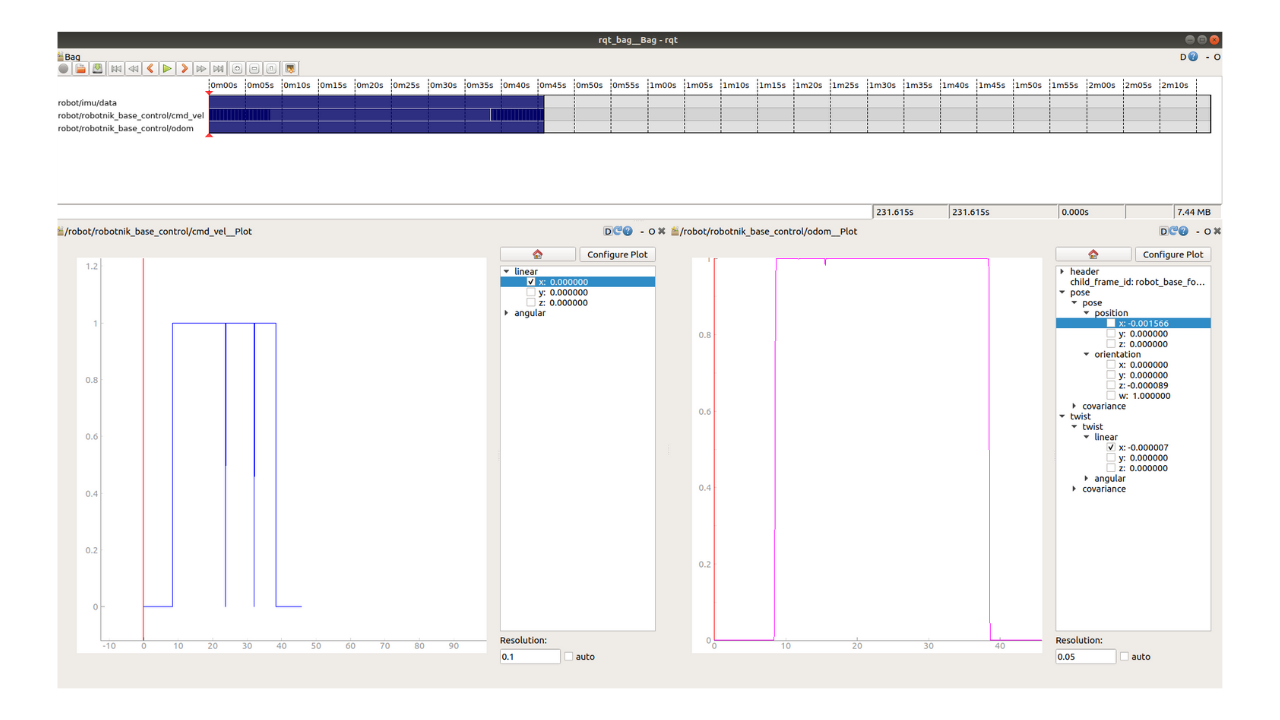 Ideally, both the input and outputs must match, as we do the robot motion in a ideal simulation environment. Can anyone clarify why this discrepancy pops up?
Ideally, both the input and outputs must match, as we do the robot motion in a ideal simulation environment. Can anyone clarify why this discrepancy pops up?