turtlebot3
 turtlebot3 copied to clipboard
turtlebot3 copied to clipboard
Using global_palnner for A star algorithm makes the planned path stick to walls and collide.
ISSUE TEMPLATE ver. 0.4.0
-
Which TurtleBot3 platform do you use?
- Burger
-
Which ROS is working with TurtleBot3?
- ROS 1 Melodic Morenia
-
Which SBC(Single Board Computer) is working on TurtleBot3?
- just simulating in RVIZ and Gazebo
-
Which OS you installed on SBC?
- Ubuntu preinstalled server (18.04/20.04)
-
Which OS you installed on Remote PC?
- Just simulating
-
Specify the software and firmware version(Can be found from Bringup messages)
PARAMETERS
* /rosdistro: melodic
* /rosversion: 1.14.12
* /turtlebot3_core/baud: 115200
* /turtlebot3_core/port: /dev/ttyACM0
* /turtlebot3_core/tf_prefix:
* /turtlebot3_lds/frame_id: base_scan
* /turtlebot3_lds/port: /dev/ttyUSB0
NODES
/
turtlebot3_core (rosserial_python/serial_node.py)
turtlebot3_diagnostics (turtlebot3_bringup/turtlebot3_diagnostics)
turtlebot3_lds (hls_lfcd_lds_driver/hlds_laser_publisher)
ROS_MASTER_URI=http://localhost:11311
- Specify the commands or instructions to reproduce the issue.
Trying to use the A star algorithm from GlobalPlanner for global planing and not the dijkstra or NavFn. These are my parameters for implementing GlobalPlanner
GlobalPlanner:
old_navfn_behavior: false
use_quadratic: true
use_dijkstra: false
use_grid_path: true
allow_unknown: true
planner_window_x: 0.0
planner_window_y: 0.0
default_tolerance: 0.0
publish_scale: 100
planner_costmap_publish_frequency: 0.0
lethal_cost: 253
neutral_cost: 50
cost_factor: 3.0
publish_potential: true
I set base_global_planner as global_planner/GlobalPlanner. to use the a star algorithm is set use_dijkstra to false and use_grid_path to true
- Copy and Paste the error messages on terminal.
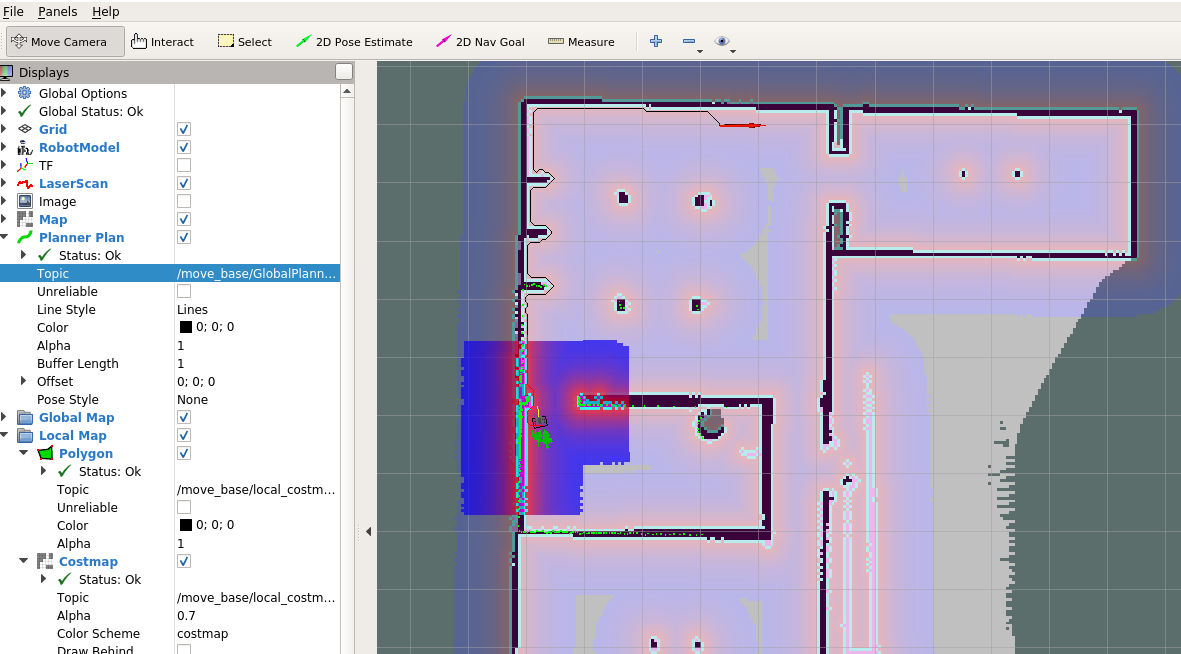
- Please describe the issue in detail. Upon trying to use the a star algorithm the turtlebot sticks to walls. and ends up colliding a lot and getting stuck in the corners. By simply reverting back to NavFn and not using GlobalPlanner or turning use_dijkstra to true again the issue is no more. How can I implement a proper A* algorithm.
Hello. @keshri-prasanjeet You can get more answers to questions about navigation algorithms in the ros forum. Please contact us in the ros forum.
thank you.