Luke Lashley
Luke Lashley
Looking at the go2rtc code, I don't see a straight forward way to add it into the roborock integration itself (that the core maintainers will accept when this part of...
Yeah - I saw Nest's implementation @AlexxIT Camera Entities have a function: async def async_handle_web_rtc_offer(self, offer_sdp: str) -> str | None: which nest returns their "answer_sdp" to However, looking at...
I don't have a dock - and I'm not sure if the maintainer does either, but I am happy to try to get this integrated. Can you enable debug logging...
@w0nk1 Now open file editor in home assistant, go to custom components/roborock/__init__.py then in async_setup_entry find where it says client = RoborockMqttClient(user_data, device_map) and add this beneath it test =...
Ah I hadn't even started looking at that part yet. I was only looking at the consumables to see In my maintenance tab I have these 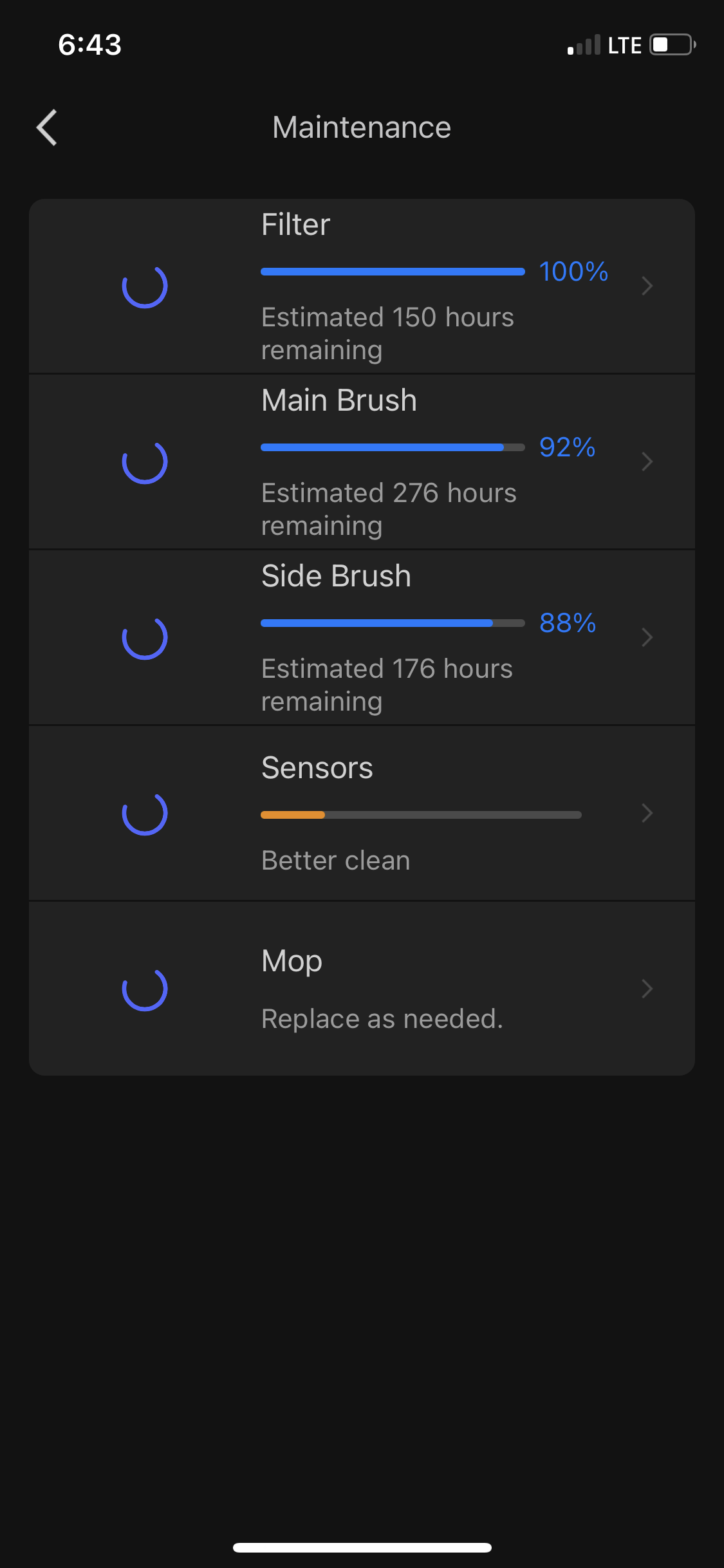 It's my understanding...
@w0nk1 Okay I'm about to hit a lot at you. If you feel up to it/ you think you could, There's a way to reverse engineer some of the mqtt...
@JurajNyiri I'm tagging you because of your contribution on issue #130 . I plan to incorporate that information you shared in addition to the sensor information. Could you follow the...
``` service: vacuum.send_command data: command: get_status target: entity_id: vacuum.roborock_s7 ``` If it isn't working still, try going to HACS, select roborock and then hit redownload, and select "main". Then re-enable...
@w0nk1 perfect - thank you. Can you also check this > Check and see if get_dust_collection_mode is the same as 'dust_collection_status' in get_status' result
@w0nk1 can you see if it changes if you change the mode? I.e. to balanced if it changes to 2 in get_status?