Reachability.jl
 Reachability.jl copied to clipboard
Reachability.jl copied to clipboard
Simulation
CORA always adds a few sample simulations in the plots. I like this feature.
A simple approach would be a fixed-step simulation where inputs do not change between steps (discrete time reachability). The function should also be usable without reachability analysis. It would be good to keep the code generic in order to add options later (e.g., "always take the maximum/minimum inputs").
I think a solid and extensible approach is to pass the linear/hybrid/nonlinear to the combo OrdinaryDiffEq+Distributions for trajectory generation.
I've experimented with linear affine systems:
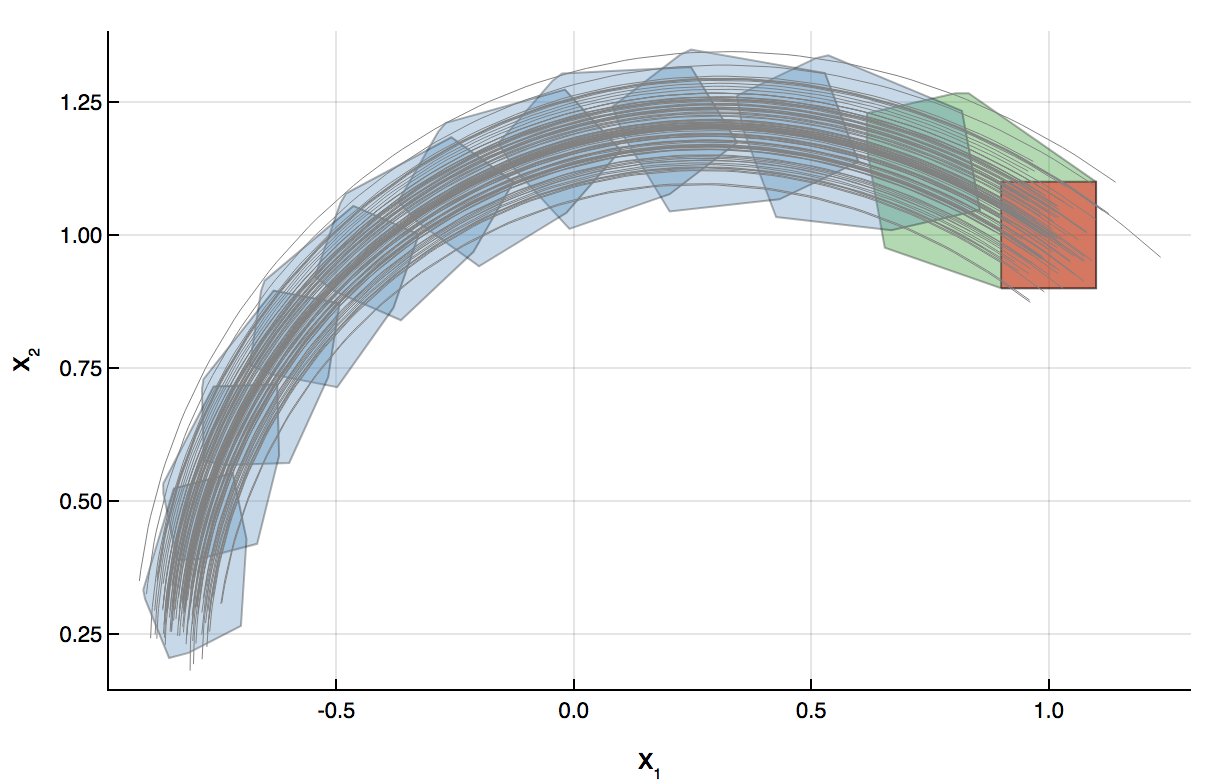
But i haven't uploaded the branch because i wanted to understand and use the lower level API integrator that would be efficient for a very large number of trajectories (or a hybrid system with several jumps, i guess).
Regarding hybrid systems, i have less experience with the event-based API in OrdinaryDiffEq, but there are examples in the github organization to learn the basics.