LazySets.jl
 LazySets.jl copied to clipboard
LazySets.jl copied to clipboard
Published
20 hours ago •
 JuliaReach
JuliaReach
Support function of lazy intersection with Optim depends on the order of the operands
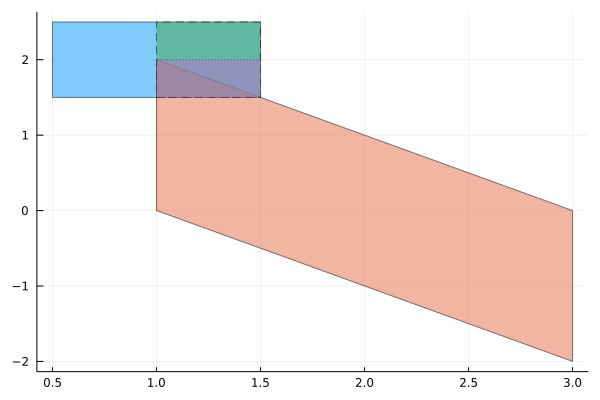
The box approximation with Optim is too coarse.
julia> X = BallInf([1.0, 2.0], 0.5);
julia> Y = linear_map([1 0; -1 1], BallInf([2.0, 2.0], 1.0));
julia> Z = box_approximation(X ∩ Y) # requires Optim
Hyperrectangle{Float64, Vector{Float64}, Vector{Float64}}([1.2499999998151363, 1.9999999999999998], [0.25000000018486335, 0.4999999999999998])
julia> plot(X)
julia> plot!(Y)
julia> plot!(Z, ls=:dash)
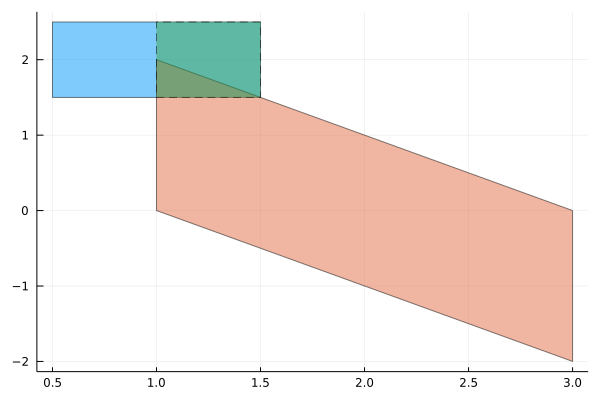
Note that with the "min" heuristics the result of box_approximate is correct.
as in other cases, we could make that Z = box_approximation(::Intersection) concretizes its input if it's 2D and use the fallback otherwise. this has two advantages, it is faster and more precise.
The problem is with the order of the operands. We choose to iterate the constraints of the second set. One option is to do it symmetrically.
https://github.com/JuliaReach/LazySets.jl/blob/e46871a72fd5c9a8ee3d2d76d6d1d506fc22ffb1/src/LazyOperations/Intersection.jl#L454-L455
julia> W = box_approximation(Y ∩ X)
Hyperrectangle{Float64, Vector{Float64}, Vector{Float64}}([1.2500000017389405, 1.74999999878812], [0.25000000173894055, 0.2500000012118808])
julia> plot!(W, ls=:dot)