Formula-Student-Driverless-Simulator
 Formula-Student-Driverless-Simulator copied to clipboard
Formula-Student-Driverless-Simulator copied to clipboard
Published
20 hours ago •
 FS-Driverless
FS-Driverless
Odom angular velocity is noisy
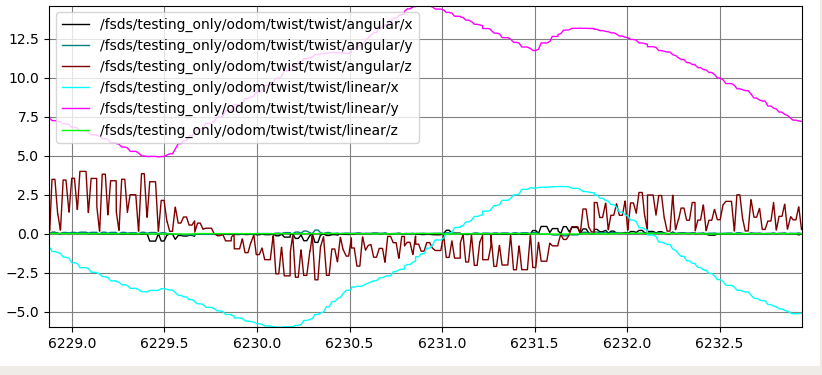
I noticed the same problem when I tried to derive the angular orientation to obtain the yaw rate. The cause of the problem is the same as described in #156. It's also clearly visible in your plot. Every time there is no change between two published values in the orientation, the angular velocity is equal to zero because the derivative of two constant values is zero. you could choose a publisher frequency lower than the tick rate of the sim or increase the tick rate of the simas you have mentioned here #166