global rotation problem
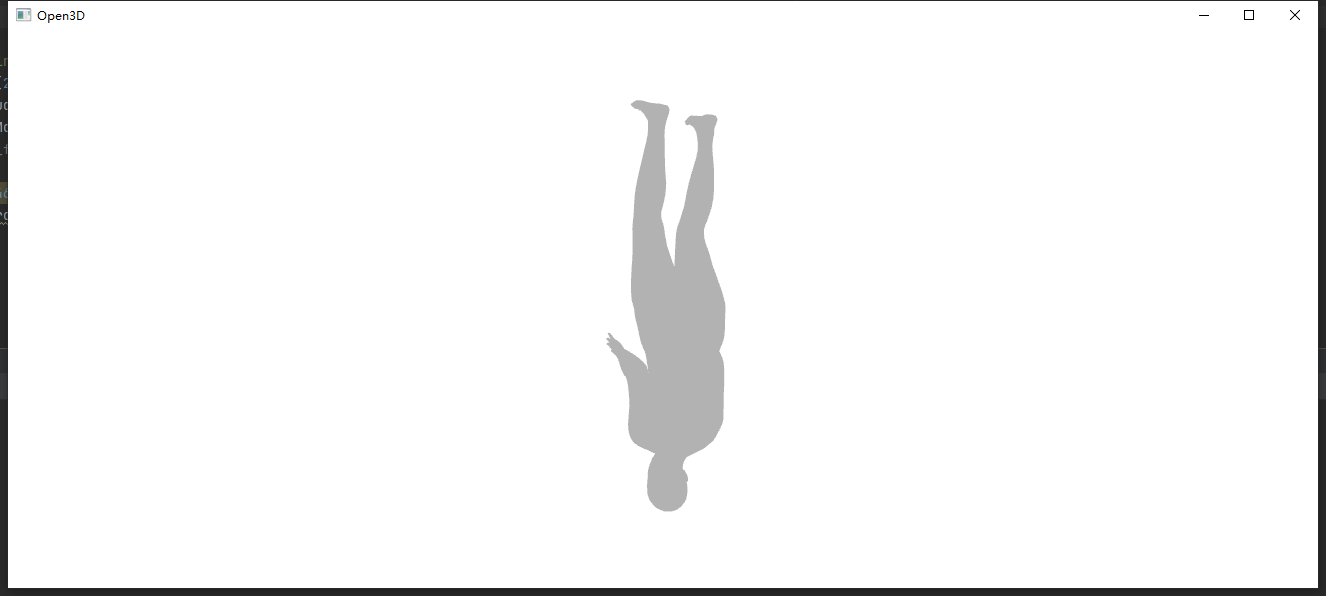
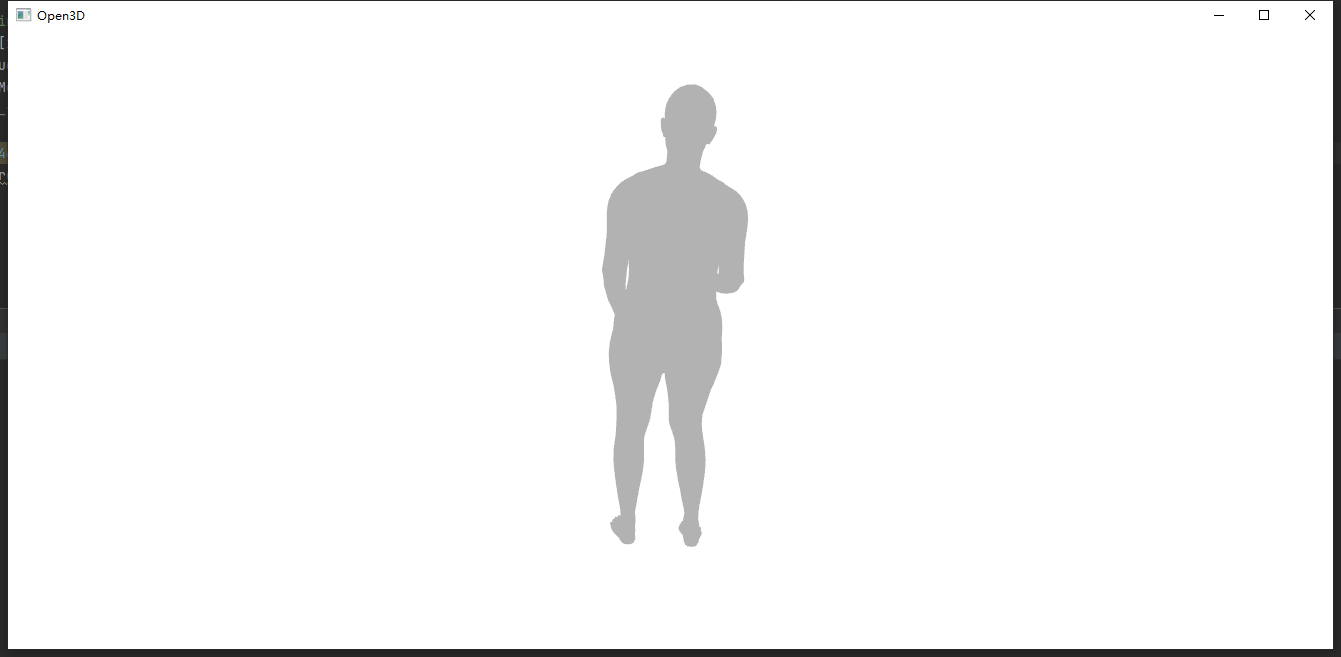
Hi, when I input the output['smpl_thetas'] into smpl.pose and then visualize it, I find the global rotation is upside down. I rotated the quaternion by -180 degrees about the X-axis and -90 degrees about the z-axis, but it was still wrong, what rotation do I need to do about those axes?
Here is an example to convert to a blender 3D view: https://github.com/Arthur151/ROMP/blob/a349c6bf4d6229b8fba2e900d38ef210888937d0/simple_romp/tools/convert2fbx.py#L192
I see. Thank you. I would like to know if the smpl is a left-handed coordinate system? Is the root joint of the smpl rotated around the (1, 0, 0) unit vector? I was recently thinking of converting the smpl axis Angle to a global right-handed xyz coordinate system quaternion, but the rotation of the conversion was incorrect, and I used the following code: first
def local_to_global(poses, parents, output_format='aa', input_format='aa'):
"""
Convert relative joint angles to global ones by unrolling the kinematic chain.
:param poses: A tensor of shape (N, N_JOINTS*3) defining the relative poses in angle-axis format.
:param parents: A list of parents for each joint j, i.e. parent[j] is the parent of joint j.
:param output_format: 'aa' or 'rotmat'.
:param input_format: 'aa' or 'rotmat'
:return: The global joint angles as a tensor of shape (N, N_JOINTS*DOF).
"""
assert output_format in ['aa', 'rotmat']
assert input_format in ['aa', 'rotmat']
dof = 3 if input_format == 'aa' else 9
n_joints = poses.shape[-1] // dof
if input_format == 'aa':
local_oris = aa2rot_torch(poses.reshape((-1, 3)))
else:
local_oris = poses
local_oris = local_oris.reshape((-1, n_joints, 3, 3))
global_oris = torch.zeros_like(local_oris)
for j in range(n_joints):
if parents[j] < 0:
# root rotation
global_oris[..., j, :, :] = local_oris[..., j, :, :]
else:
parent_rot = global_oris[..., parents[j], :, :]
local_rot = local_oris[..., j, :, :]
global_oris[..., j, :, :] = torch.matmul(parent_rot, local_rot)
if output_format == 'aa':
global_oris = rot2aa_torch(global_oris.reshape((-1, 3, 3)))
res = global_oris.reshape((-1, n_joints * 3))
else:
res = global_oris.reshape((-1, n_joints * 3 * 3))
return res
then
def transform_rot_representation(rot, input_type='mat',out_type='quat',input_is_degrees=True):
'''
make transformation between different representation of 3D rotation
input_type / out_type (np.array):
'mat': rotation matrix (3*3)
'quat': quaternion (4)
'vec': rotation vector (3)
'euler': Euler degrees in x,y,z (3)
'''
if input_type=='mat':
r = R.from_matrix(rot)
elif input_type=='quat':
r = R.from_quat(rot)
elif input_type =='vec':
r = R.from_rotvec(rot)
elif input_type =='euler':
r = R.from_euler('xyz',rot, degrees=input_is_degrees)
if out_type=='mat':
out = r.as_matrix()
elif out_type=='quat':
out = r.as_quat()
elif out_type =='vec':
out = r.as_rotvec()
elif out_type =='euler':
out = r.as_euler('xyz', degrees=False)
return out
Can you help me see what's wrong?