dataset-api
 dataset-api copied to clipboard
dataset-api copied to clipboard
Caculate depth from disparity map
As I know, we can calculate depth from disparity follow: depth = baseline * focal / disparity.
I'm using stereo_train_01.zip (4.4GB) to calculate depth map from disparity. I can find focal from intrinsic.txt but cannot find baseline of camera.
Can you guides help me:
- Where can i find baseline parameter of stereo camera? or
- How to calculate depth from disparity map using Apoloscapes Dataset? Many thanks!
As I know, we can calculate depth from disparity follow: depth = baseline * focal / disparity. I'm using stereo_train_01.zip (4.4GB) to calculate depth map from disparity. I can find focal from
intrinsic.txtbut cannot find baseline of camera. Can you guides help me:
- Where can i find baseline parameter of stereo camera? or
- How to calculate depth from disparity map using Apoloscapes Dataset? Many thanks!
Hi, I have the same problem with you. Do you find the baseline parameter? Many thanks in advance for your reply!
As I know, we can calculate depth from disparity follow: depth = baseline * focal / disparity. I'm using stereo_train_01.zip (4.4GB) to calculate depth map from disparity. I can find focal from
intrinsic.txtbut cannot find baseline of camera. Can you guides help me:
- Where can i find baseline parameter of stereo camera? or
- How to calculate depth from disparity map using Apoloscapes Dataset? Many thanks!
Hi, I have the same problem with you. Do you find the baseline parameter? Many thanks in advance for your reply!
focal = 2301.3147 (pixel) But now i can't find document that mentioned it. I will find later
Hi, Many thanks for your reply! I also try to ask the writer of the paper published on CVPR. Yet I receive no feedback. Let's keep in contact!
As I know, we can calculate depth from disparity follow: depth = baseline * focal / disparity. I'm using stereo_train_01.zip (4.4GB) to calculate depth map from disparity. I can find focal from
intrinsic.txtbut cannot find baseline of camera. Can you guides help me:
- Where can i find baseline parameter of stereo camera? or
- How to calculate depth from disparity map using Apoloscapes Dataset? Many thanks!
Hi, I have the same problem with you. Do you find the baseline parameter? Many thanks in advance for your reply!
focal = 2301.3147 (pixel) But now i can't find document that mentioned it. I will find later
Hi, It seems that I have found it in their Chinese operation manual (url: http://data.apollo.auto/static/pdf/lidar_obstacle_label.pdf ). According to values on the picture, the baseline should be 0.36m

oh, so sorry, i have a mistake.
On Thu, Oct 17, 2019 at 12:53 PM Zhu-Jinkuan [email protected] wrote:
As I know, we can calculate depth from disparity follow: depth = baseline
focal / disparity. I'm using stereo_train_01.zip (4.4GB) to calculate depth map from disparity. I can find focal from intrinsic.txt but cannot find baseline of camera. Can you guides help me:
- Where can i find baseline parameter of stereo camera? or
- How to calculate depth from disparity map using Apoloscapes Dataset? Many thanks!
Hi, I have the same problem with you. Do you find the baseline parameter? Many thanks in advance for your reply!
focal = 2301.3147 (pixel) But now i can't find document that mentioned it. I will find later
Hi, It seems that I have found it in their Chinese operation manual (url: http://data.apollo.auto/static/pdf/lidar_obstacle_label.pdf ). According to values on the picture, the baseline should be 0.36m
[image: image] https://user-images.githubusercontent.com/42997811/66981131-76a1c100-f0e5-11e9-8cb0-9e46c82f910d.png
— You are receiving this because you authored the thread. Reply to this email directly, view it on GitHub https://github.com/ApolloScapeAuto/dataset-api/issues/25?email_source=notifications&email_token=AIFPE4PETDDYITF3TGATFHDQO74VFA5CNFSM4IEZPLRKYY3PNVWWK3TUL52HS4DFVREXG43VMVBW63LNMVXHJKTDN5WW2ZLOORPWSZGOEBO4CKA#issuecomment-543015208, or unsubscribe https://github.com/notifications/unsubscribe-auth/AIFPE4JNJ2OHCPFZWMDSJ2LQO74VFANCNFSM4IEZPLRA .
-- Nguyen Van Huy T: (+84) 972 973 146 (zalo) | Skype: [email protected] | M: [email protected] Mechatronics Engineer
As I know, we can calculate depth from disparity follow: depth = baseline * focal / disparity. I'm using stereo_train_01.zip (4.4GB) to calculate depth map from disparity. I can find focal from
intrinsic.txtbut cannot find baseline of camera. Can you guides help me:
- Where can i find baseline parameter of stereo camera? or
- How to calculate depth from disparity map using Apoloscapes Dataset? Many thanks!
Hi, I have the same problem with you. Do you find the baseline parameter? Many thanks in advance for your reply!
focal = 2301.3147 (pixel) But now i can't find document that mentioned it. I will find later
Hi, It seems that I have found it in their Chinese operation manual (url: http://data.apollo.auto/static/pdf/lidar_obstacle_label.pdf ). According to values on the picture, the baseline should be 0.36m
I am afraid it's not correct. The vehicle used in Apollo dataset paper is a Toyata SUV, but your image looks like a sedan. I won't use this dataset anymore.
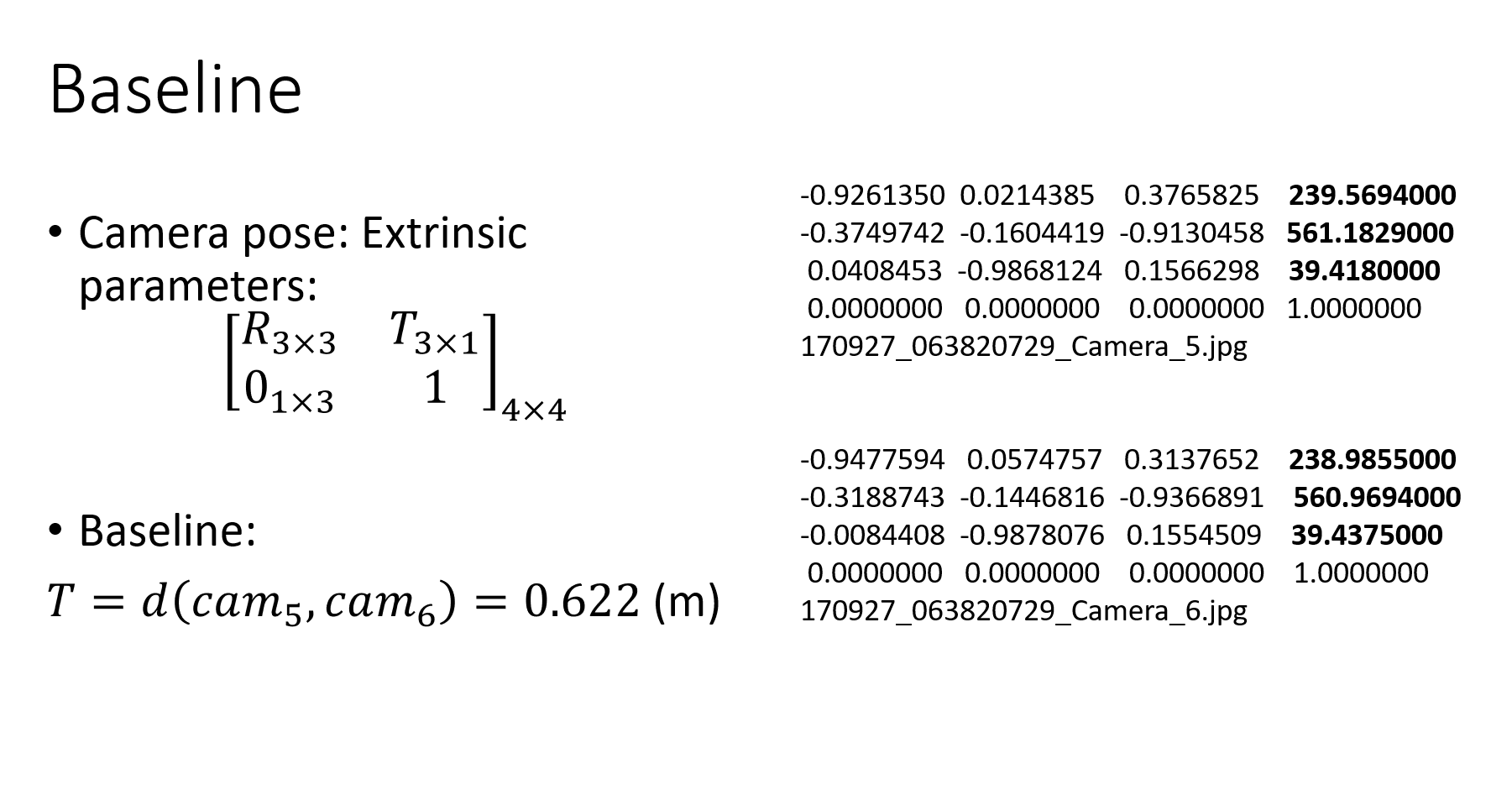
Hi. Please check my method to calculate the baseline for Apolloscape dataset:
- I got the Extrinsic parameters of the two cameras from the
pose.txtfiles inroad02_ins. - Then, the baseline is the distance between these two cameras.
- I calculated the distances as normal distances formula for all pairs and got the average result of the baseline around 0.622m.
Guys, does anyone know how to convert disparity to metric depth? I first use disp = disp / 200 as the readme.txt says the disparity value is 200 times larger than groundtruth, then I use depth = 0.622 * 2301.3147 / (disp + 1e-8) to get depth, but the results seem incorrect, because I found that the minimum depth value is over 2000. Is it because the focal length or disparity is formatted at the pixel level and not at the metric (meter) level?
Guys, does anyone know how to convert disparity to metric depth? I first use
disp = disp / 200as the readme.txt says the disparity value is 200 times larger than groundtruth, then I usedepth = 0.622 * 2301.3147 / (disp + 1e-8)to get depth, but the results seem incorrect, because I found that the minimum depth value is over 2000. Is it because the focal length or disparity is formatted at the pixel level and not at the metric (meter) level?
Hi, did you ever resolve this issue?