yarp
 yarp copied to clipboard
yarp copied to clipboard
Published
20 hours ago •
 robotology
robotology
YarpManager application: problem keeping the same order when including other applications
trafficstars
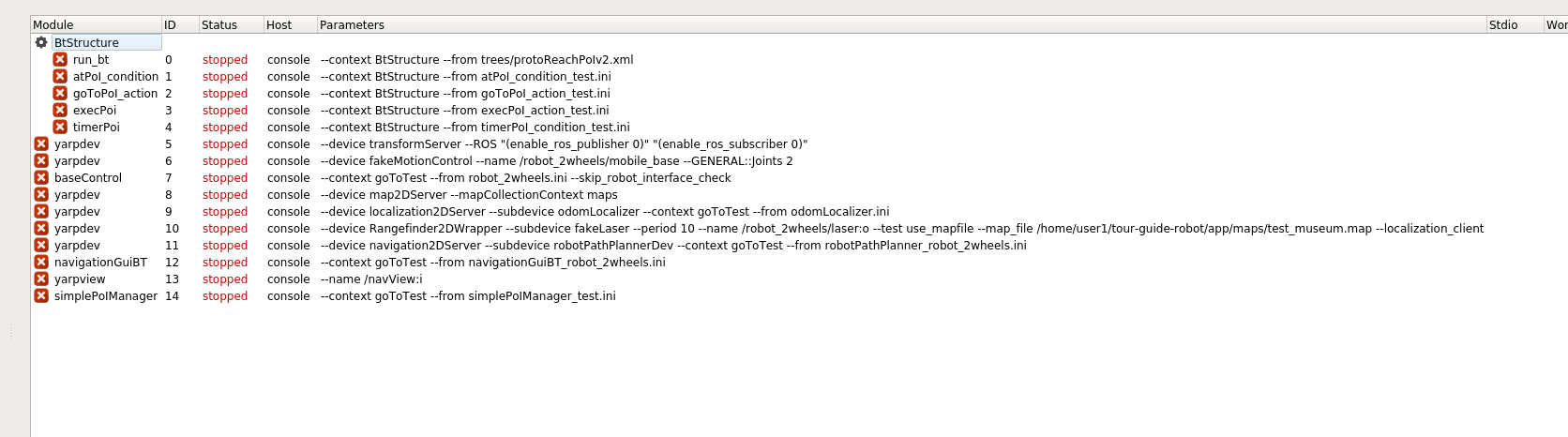
Describe the bug When I try to include another application in my xml the execution order is not kept in yarpmanager and it could be very confusing. In the following example I include different modules in my application and at the end there is also a reference to another application. As you can see from the image, in yarpmanager the application included is the first one.
Here the xml:
<application>
<name>GoToTestv2</name>
<dependencies>
</dependencies>
<module>
<name>yarpdev</name>
<parameters>--device transformServer --ROS "(enable_ros_publisher 0)" "(enable_ros_subscriber 0)"</parameters>
<node>console</node>
</module>
<module>
<name>yarpdev</name>
<parameters>--device fakeMotionControl --name /robot_2wheels/mobile_base --GENERAL::Joints 2</parameters>
<node>console</node>
</module>
<module>
<name>baseControl</name>
<parameters>--context goToTest --from robot_2wheels.ini --skip_robot_interface_check</parameters>
<node>console</node>
</module>
<module>
<name>yarpdev</name>
<parameters>--device map2DServer --mapCollectionContext maps</parameters>
<node>console</node>
</module>
<module>
<name>yarpdev</name>
<parameters>--device localization2DServer --subdevice odomLocalizer --context goToTest --from odomLocalizer.ini</parameters>
<node>console</node>
</module>
<module>
<name>yarpdev</name>
<parameters>--device Rangefinder2DWrapper --subdevice fakeLaser --period 10 --name /robot_2wheels/laser:o --test use_mapfile --map_file /home/user1/tour-guide-robot/app/maps/test_museum.map --localization_client</parameters>
<node>console</node>
</module>
<module>
<name>yarpdev</name>
<parameters>--device navigation2DServer --subdevice robotPathPlannerDev --context goToTest --from robotPathPlanner_robot_2wheels.ini</parameters>
<node>console</node>
</module>
<module>
<name>navigationGuiBT</name>
<parameters>--context goToTest --from navigationGuiBT_robot_2wheels.ini</parameters>
<node>console</node>
</module>
<module>
<name>yarpview</name>
<parameters>--name /navView:i</parameters>
<node>console</node>
</module>
<module>
<name>simplePoIManager</name>
<parameters>--context goToTest --from simplePoIManager_test.ini</parameters>
<node>console</node>
</module>
<application>
<name>BtStructure</name>
<prefix></prefix>
</application>
</application>
Screenshots