opencv_contrib
 opencv_contrib copied to clipboard
opencv_contrib copied to clipboard
Kinfu class has a different behavior between OpenCV 4.2.0 and OpenCV 4.5.3
System information (version)
- OpenCV => 4.5.3
- Operating System / Platform => Windows 64 Bit
- Compiler => Visual Studio 2019
Detailed description
Hi, I am trying to upgrade my code from 4.2.0 to 4.5.3.
In our current 4.2 version, we modified the kinfu::Params to accommodate our needs. However, using the same settings in the 4.5.3 version generates a model with more noise and less information on the vertical walls.
Model created with ver 4.2.0

Model created with ver 4.5.3
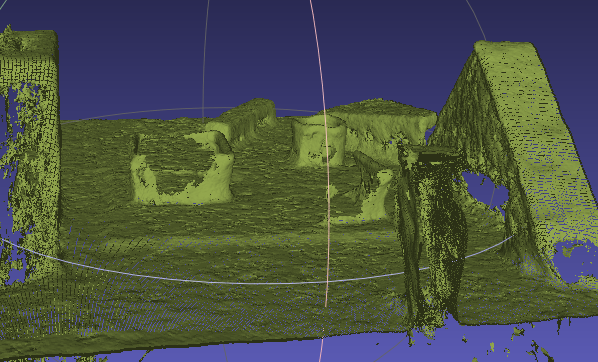
For my test, I used the same set of images as input data, and both models end with ~1.2 million points.
Are there any changes on the parameters that we need to modify or adapt? Thanks
Carlos
Hi, do you kown how to save as 3D Mesh using Kinfu_demo? I can run Kinfu_demo, but I do not kown how to save uMat as point define as uMat. Can you give me a help.Thanks!

Hi, do you kown how to save as 3D Mesh using Kinfu_demo? I can run Kinfu_demo, but I do not kown how to save uMat as point define as uMat. Can you give me a help.Thanks!
Hello, I got an unexpected error when I run with the simple code Ptr<Params> params = Params::defaultParams(); and the error comes undefined reference to cv::kinfu::Params::defaultParams()'`. Do you have any idea why this error appears or could you please post your Kinfu_demo? Thanks a lot!
Hi, do you kown how to save as 3D Mesh using Kinfu_demo? I can run Kinfu_demo, but I do not kown how to save uMat as point define as uMat. Can you give me a help.Thanks!
I have not tried to save the UMat; in my current implementation flow, I save the frames from the camera as binary data (cv::Mat) and then copy to Umat in order to generate the 3D Model. The code for saving/loading a cv::Mat as is here: https://github.com/takmin/BinaryCvMat/blob/master/BinaryCvMat.cpp
When the 3D model is calculated, I am using pcl to generate a PointCloud and then save the information. I am sure this could be implemented in any other platform you might be using:
` // Gets a point cloud with the points and normals void GetPointCloud(Mat& points, Mat& normals, pcl::PointCloudpcl::PointNormal& cloud)
{
// Convert data into PCL types in order to be saved
for (int i = 0; i < points.rows; ++i)
{
pcl::Normal n;
pcl::PointNormal point;
point.x = points.at
Hope this helps
Carlos
I am using the code provided in the opencv_contrib:
https://github.com/opencv/opencv_contrib/blob/4.x/modules/rgbd/samples/kinfu_demo.cpp https://github.com/opencv/opencv_contrib/blob/4.x/modules/rgbd/samples/colored_kinfu_demo.cpp
BR.Carlos
I am using the code provided in the opencv_contrib:
https://github.com/opencv/opencv_contrib/blob/4.x/modules/rgbd/samples/kinfu_demo.cpp https://github.com/opencv/opencv_contrib/blob/4.x/modules/rgbd/samples/colored_kinfu_demo.cpp
BR.Carlos
Got it, thanks!