spot_micro_kinematics_python
 spot_micro_kinematics_python copied to clipboard
spot_micro_kinematics_python copied to clipboard
updating comments on leg matrix t01 to show differences between origi…
Thanks for going through the paper and finding the discrepancies with matrix t01 and t12. It helped me a lot as I was looking through this. I found one typo I think in the comments of your code, where the paper t01 matrix i see here https://www.ijstr.org/final-print/sep2017/Inverse-Kinematic-Analysis-Of-A-Quadruped-Robot.pdf in row index 1 col index 1 has positive cos(theta1).
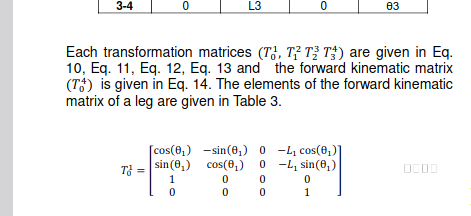
The matrix in the paper still has weird stuff going on in the row index 2. I only threw this PR out as the comments confused me slightly as I was comparing the matrices in your comments to the paper.
I agree with you, and did out the matrix math using their DH parameters and arrive at the same thing you got. https://wikimedia.org/api/rest_v1/media/math/render/svg/6963d0c47a3a894ff0719c8df348d188b996074e
| joint i | theta i (degree) | alpha i (degree) | r i (meters) | d i (meters) |
|---|---|---|---|---|
| 0-1 | theta1 | 0 | l1 | 0 |
Looking at t01:
| cos(theta1) | -sin(theta1)*cos(0) | sin(theta1) * sin(0) | -l1 * cos(theta1) |
| sin(theta1) | cos(theta1) * cos(0) | -cos(theta1) * sin(0) | -l1 * sin(theta1) |
| 0 | sin(0) | cos(0) | 0 |
| 0 | 0 | 0 | 1 |
so that is:
| cos(theta1) | -sin(theta1)* 1 | sin(theta1) * 0 | -l1 * cos(theta1) |
| sin(theta1) | cos(theta1) * 1 | -cos(theta1) * 0 | -l1 * sin(theta1) |
| 0 | 0 | 1 | 0 |
| 0 | 0 | 0 | 1 |
so that is:
| cos(theta1) | -sin(theta1) | 0 | -l1 * cos(theta1) |
| sin(theta1) | cos(theta1) | 0 | -l1 * sin(theta1) |
| 0 | 0 | 1 | 0 |
| 0 | 0 | 0 | 1 |
I did the same thing for matrix t12, and also got something that agrees with you, just with a different sign on the 1 in row index 2. This is probably do to spot micro doing legs pointing back, and alpha being positive pi/2 instead of -pi/2 as in the paper model.