Open3D
 Open3D copied to clipboard
Open3D copied to clipboard
Published
20 hours ago •
 isl-org
isl-org
extract the pose from trajectory file in feed into colmap
trafficstars
Checklist
- [X] I have searched for similar issues.
- [X] For Python issues, I have tested with the latest development wheel.
- [X] I have checked the release documentation and the latest documentation (for
masterbranch).
My Question
Hi, i came across the trajectory.log after 'reconstruction system.py'. it contains 4x4 transformation matrix
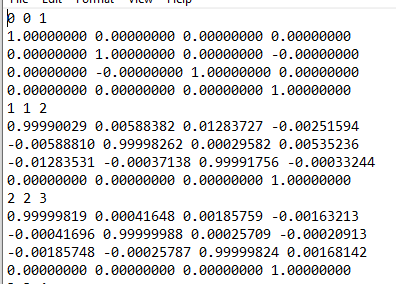
If i understand correctly, it is transformed from rotation in quaternion and translation

So, i tried to convert it back to quaternion and translation ('Qw','Qx','Qy','Qz','Tx','Ty','Tz',) using the equations in the image as known parameters in colmap for sparse and dense reconstrction.
However, reconstruction failed in colmap, so I would like to know if the transformation i did from the 4x4 matrix back to quaternion correct?
many thanks