dm_control
 dm_control copied to clipboard
dm_control copied to clipboard
How to create an environment to give depth images?
The vision environment provide only RGB images, instead of RGBD (depth) images, but I see some partial implementation of depth images. Here's my attempt to set depth=True, but it failes because the dtype is set to uint8 which cannot be inf.
import collections
import numpy as np
from dm_control import manipulation
from dm_control.manipulation.bricks import _reassemble
from dm_control.manipulation.shared import registry, tags, observations
from dm_control.manipulation.shared.observations import ObservationSettings, _ENABLED_FEATURE, _ENABLED_FTT, \
_DISABLED_FEATURE, CameraObservableSpec, ObservableSpec
class MyCameraObservableSpec(collections.namedtuple(
'CameraObservableSpec', ('depth', 'height', 'width') + ObservableSpec._fields)):
"""Configuration options for camera observables."""
__slots__ = ()
ENABLED_CAMERA_DEPTH = MyCameraObservableSpec(
height=84,
width=84,
enabled=True,
depth=True,
update_interval=1,
buffer_size=1,
delay=0,
aggregator=None,
corruptor=None)
VISION_DEPTH = ObservationSettings(
proprio=_ENABLED_FEATURE,
ftt=_ENABLED_FTT,
prop_pose=_DISABLED_FEATURE,
camera=ENABLED_CAMERA_DEPTH)
@registry.add(tags.VISION)
def my_env():
return _reassemble(obs_settings=VISION_DEPTH,
num_bricks=5,
randomize_initial_order=True,
randomize_desired_order=True)
env = manipulation.load('my_env', seed=0)
spec = env.action_spec()
for i in range(10):
a = np.random.uniform(spec.minimum, spec.maximum, spec.shape)
time_step = env.step(a)
This is actually a bug in the code. Turns out that when you call obs.configure(depth=True), it only sets the depth attribute and forgets to update the dtype attribute, which is only set in the constructor.
A hacky fix is to edit dm_control/dm_control/manipulation/shared/cameras.py:
def add_camera_observables(entity, obs_settings, *camera_specs):
"""Adds cameras to an entity's worldbody and configures observables for them.
Args:
entity: A `composer.Entity`.
obs_settings: An `observations.ObservationSettings` instance.
*camera_specs: Instances of `CameraSpec`.
Returns:
A `collections.OrderedDict` keyed on camera names, containing pre-configured
`observable.MJCFCamera` instances.
"""
obs_dict = collections.OrderedDict()
for spec in camera_specs:
camera = entity.mjcf_model.worldbody.add('camera', **spec._asdict())
obs = observable.MJCFCamera(camera)
obs.configure(**obs_settings.camera._asdict())
# ====== #
obs.configure(depth=True)
obs._dtype = np.float32 # Explicitly change the dtype.
obs._n_channels = 1 # Explicitly change the no. of channels.
# ====== #
obs_dict[spec.name] = obs
return obs_dict
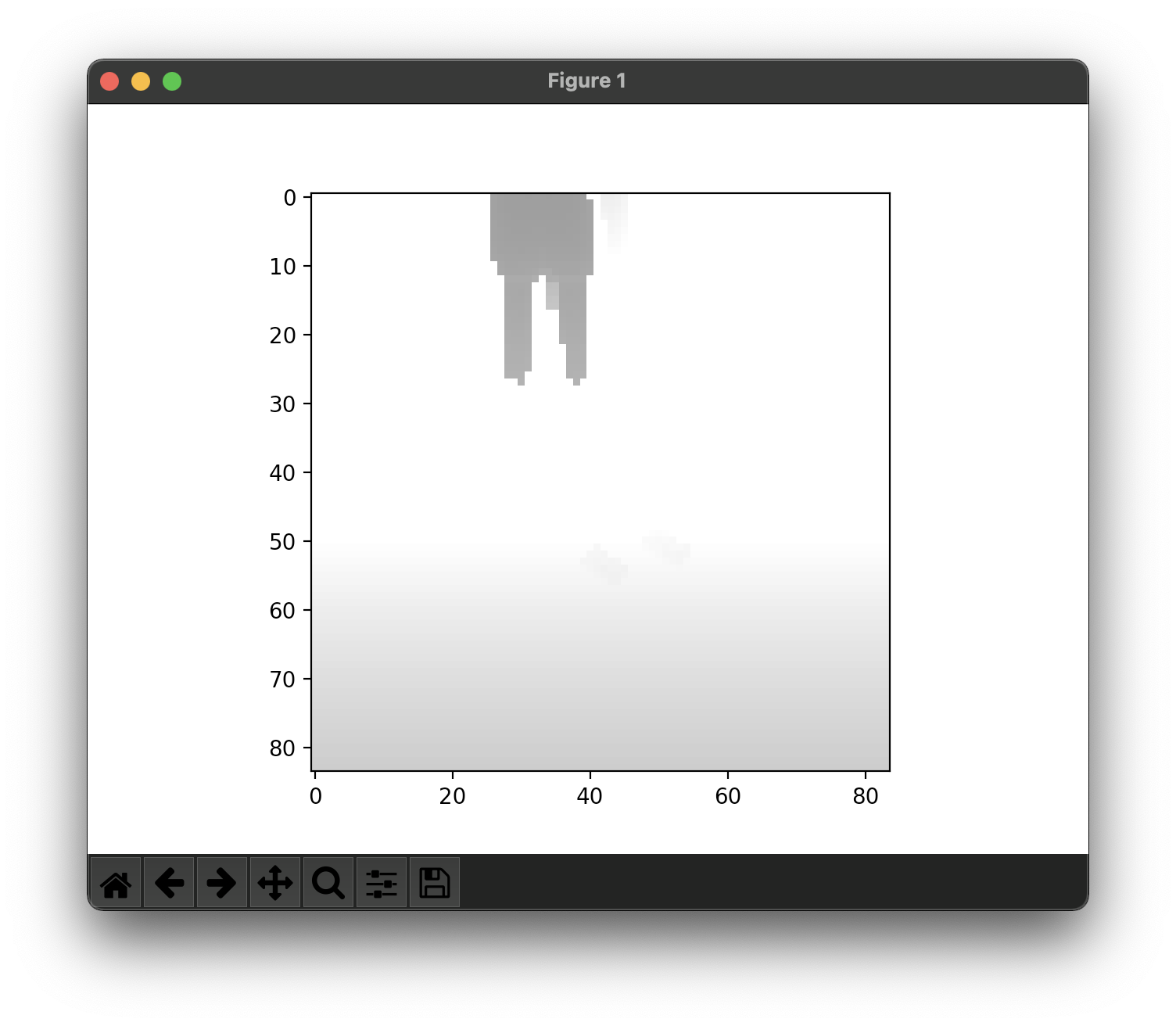
Now when I run explore with say stack_2_bricks_vision, I can plot timestep.observation["front_close"] and obtain the following (84, 84, 1) np.float32 array: