ros-semantic-segmentation
 ros-semantic-segmentation copied to clipboard
ros-semantic-segmentation copied to clipboard
Published
20 hours ago •
 dheera
dheera
can not output
trafficstars
rosrun semantic_segmentation segmentation_node __ns:=/camera
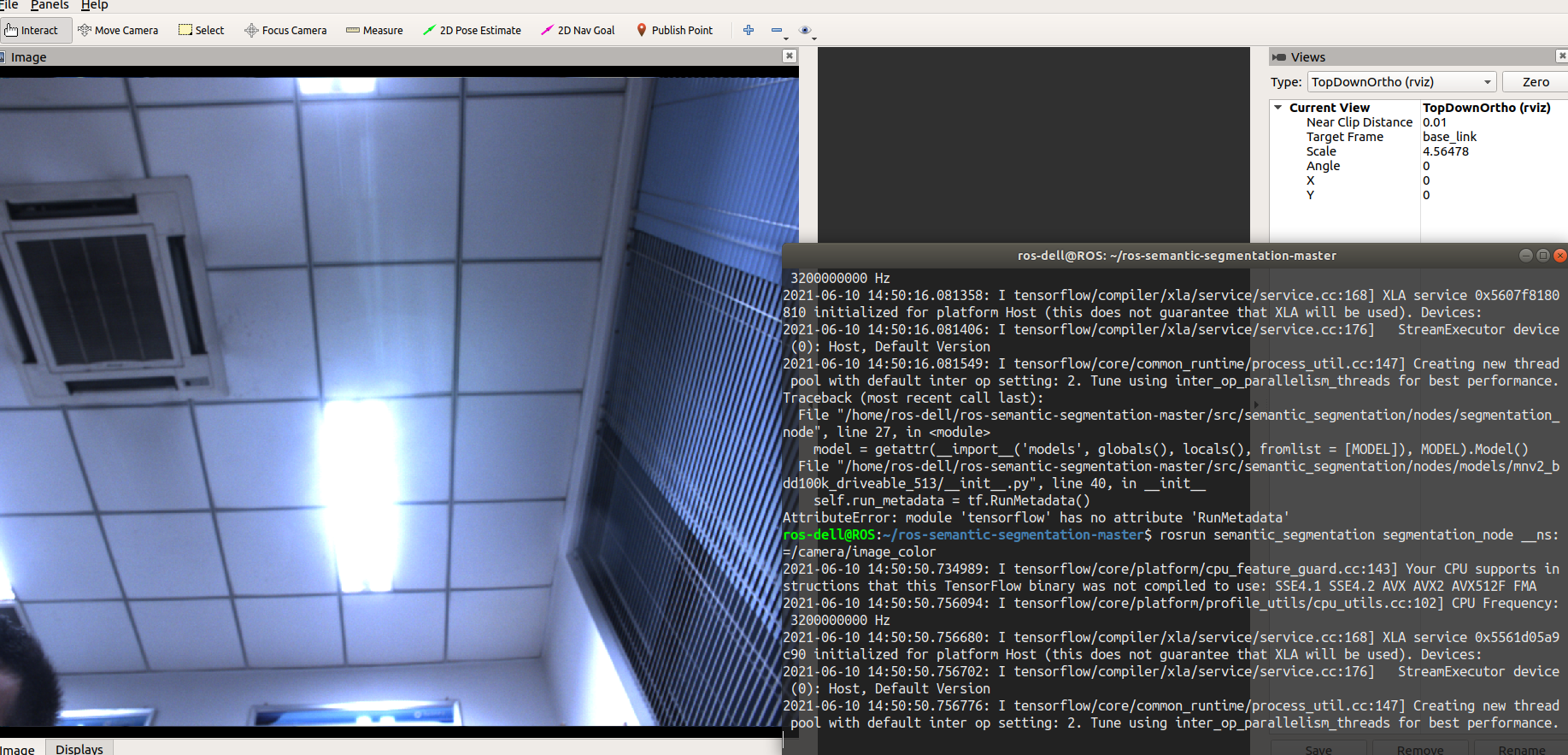
I think this is out of date and you might be using a TensorFlow 1.x model and code with TensorFlow 2.x. This repo needs updating. I'll look into it when I get a chance, but you could write your own Model that uses TF 2.x that works with the rest of the framework. The ROS node itself is agnostic to the net and framework, you just need to define it in a new directory like the other examples. I mostly provided this as an example of abstracting ROS logic from ML logic, this wasn't intended to be a SOTA segmentation net.