webots_ros2
 webots_ros2 copied to clipboard
webots_ros2 copied to clipboard
Published
20 hours ago •
 cyberbotics
cyberbotics
Tiago example:Slam can't work
Describe the Bug 'TIAGo SLAM' in 'TIAGo Example' can't build the map
Steps to Reproduce
- execute 'ros2 launch webots_ros2_tiago robot_launch.py rviz:=true slam:=true'
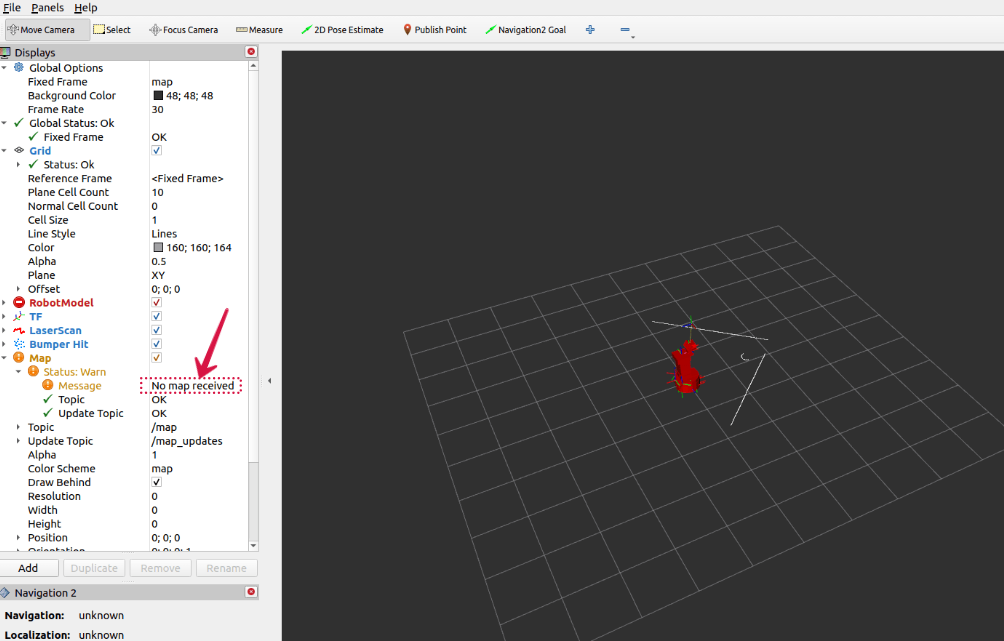
- See error 'No map recieived' in rviz
- execute 'ros2 run teleop_twist_keyboard teleop_twist_keyboard'
- See error. I can control TIAGo by keyboard, but the map can't be built
Expected behavior I could control TIAGo to build a map.
**Screens

System
- Webots Version: 2022a
- ROS Version:foxy
- Operating System: Ubuntu 20.04.3
Personally it appears to be working for me, the map topic is published for me, but I do have the LaserRangeScan warning you mention. Did you follow the install procedure described here? https://github.com/cyberbotics/webots_ros2/wiki/Build-and-Install