webots
 webots copied to clipboard
webots copied to clipboard
Pointclouds generated from Lidar nodes with non-zero roll are skewed.
Describe the Bug
Pointclouds generated by Lidar nodes with non-zero roll appears to have an additional skew applied to them. When visualised in Webots the point cloud can be seen not aligning to objects issue does appear to be in the underlying point cloud values and not just a rendering error in Webots as the additional skew can be seen in the point cloud if it is visualised in other software (i.e. pcl).
Steps to Reproduce Git repo here -> https://github.com/dscroft/webots_bug_report contains world and controller code for visualisation of the point cloud outside of Webots (requirements pcl).
- Open gimbal.wbt
- Set roll motor position to not 0
- Turn on point cloud rendering
Expected behaviour Pointcloud point positions to match object positions
Screenshots Screenshot here -> https://raw.githubusercontent.com/dscroft/webots_bug_report/main/images/wall_skew_webots_and_pcl.png Shows pointcloud in both Webots and pcl
System
- Operating System: Linux Mint 20
- Graphics Card: NVIDIA RTX 2070
It seems there is indeed something wrong with the projection:
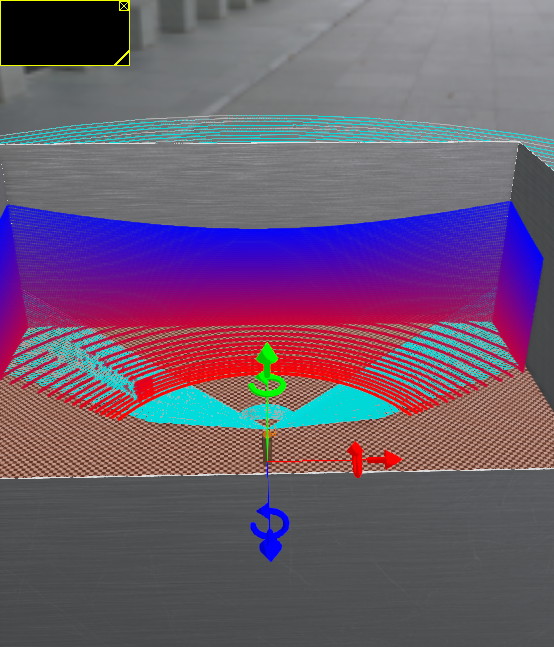 The top line should be straight.
The top line should be straight.
This is easy to reproduce with your world file even with the void controller and enabling the point-cloud mode in the robot-window.
Note that setting the near field to the default value (0.01) works better, but still there is a distortion.