ardupilot_wiki
 ardupilot_wiki copied to clipboard
ardupilot_wiki copied to clipboard
WIP Add ARK Flow
I think one of our devs is verifying compatibility with AP...waiting for feedback from him....do you intend to add AP compatibility to your product description on your web page, once its verified? thanks
Henry, there are a number of folks on the Discord that have said it is working. I also believe @patrickpoirier51 was going to be testing the updates Alex made recently to add gyro compensation outputs as well.
A few people have reported that it is working with Ardupilot. I am trying to test it myself, but I am struggling through setting up Ardupilot with cannodes. I'm not really sure how I can verify everything is working before flying. In PX4, I can use the shell to check enumerated nodes. It does not appear that Ardupilot is booting my GPS and Flow cannodes.
Alex if you cant get it to work we can see about a screenshare on Discord?
You can use the DroneCAN GUI tool to see most of the info. of nodes update params and update firmware.
Affirmative, I am waiting for a unit thanks to @AlexKlimaj @peterbarker has one on hand, maybe he could confirm if all OK
Just received it , and did basic config and bench test The setup is similar to HereFlow Set FLOW_TYPE = 6 (DroneCAN) Set CAN_P1_DRIVER = 1 to enable DroneCAN Set CAN_D1_PROTOCOL = 1 (DroneCAN)
To use the onboard lidar: Set RNGFND1_TYPE = 24 (DroneCAN) Set RNGFND1_MAX_CM = 3000 to set range finder’s maximum range to 30m
Sensor status can read correctly when looking up and moving hand over sensors

Reading on Mission Planner SLCAN work OK
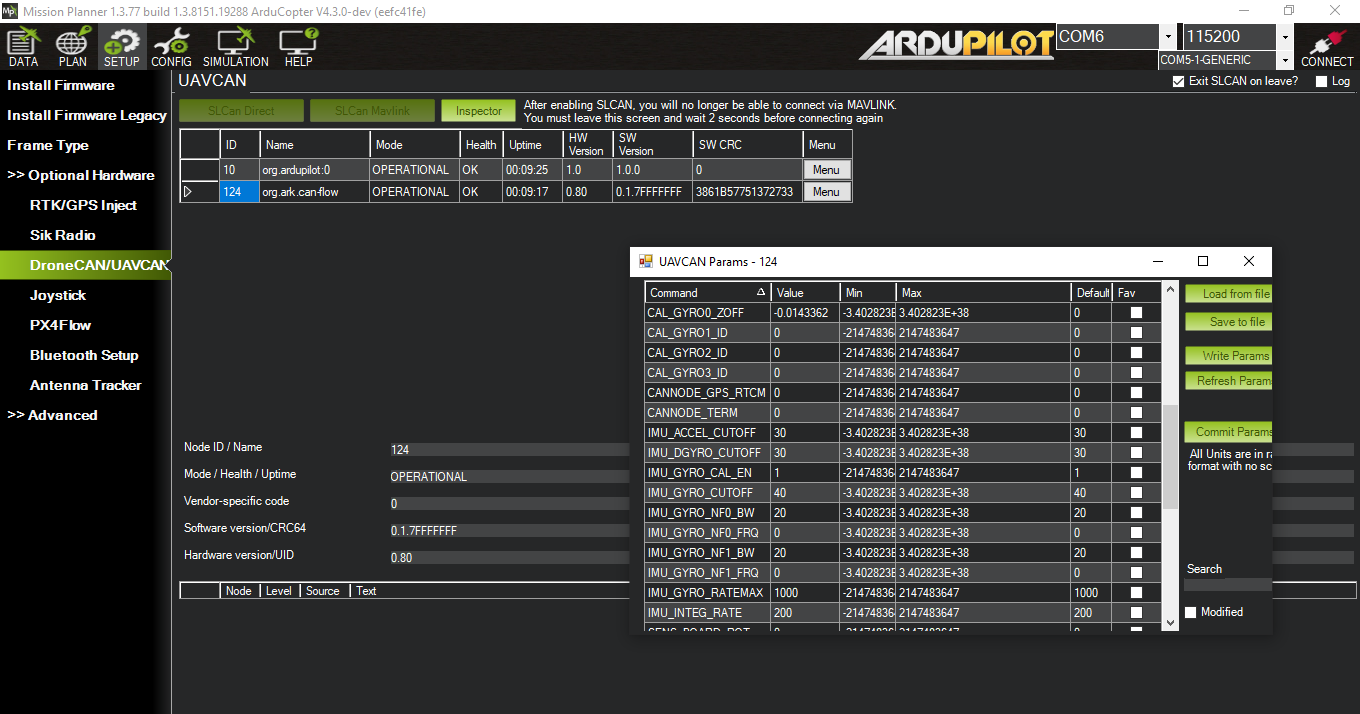
@AlexKlimaj How do we change Can Node Address ?
Next step Calibration & Flight test
I did the calibration
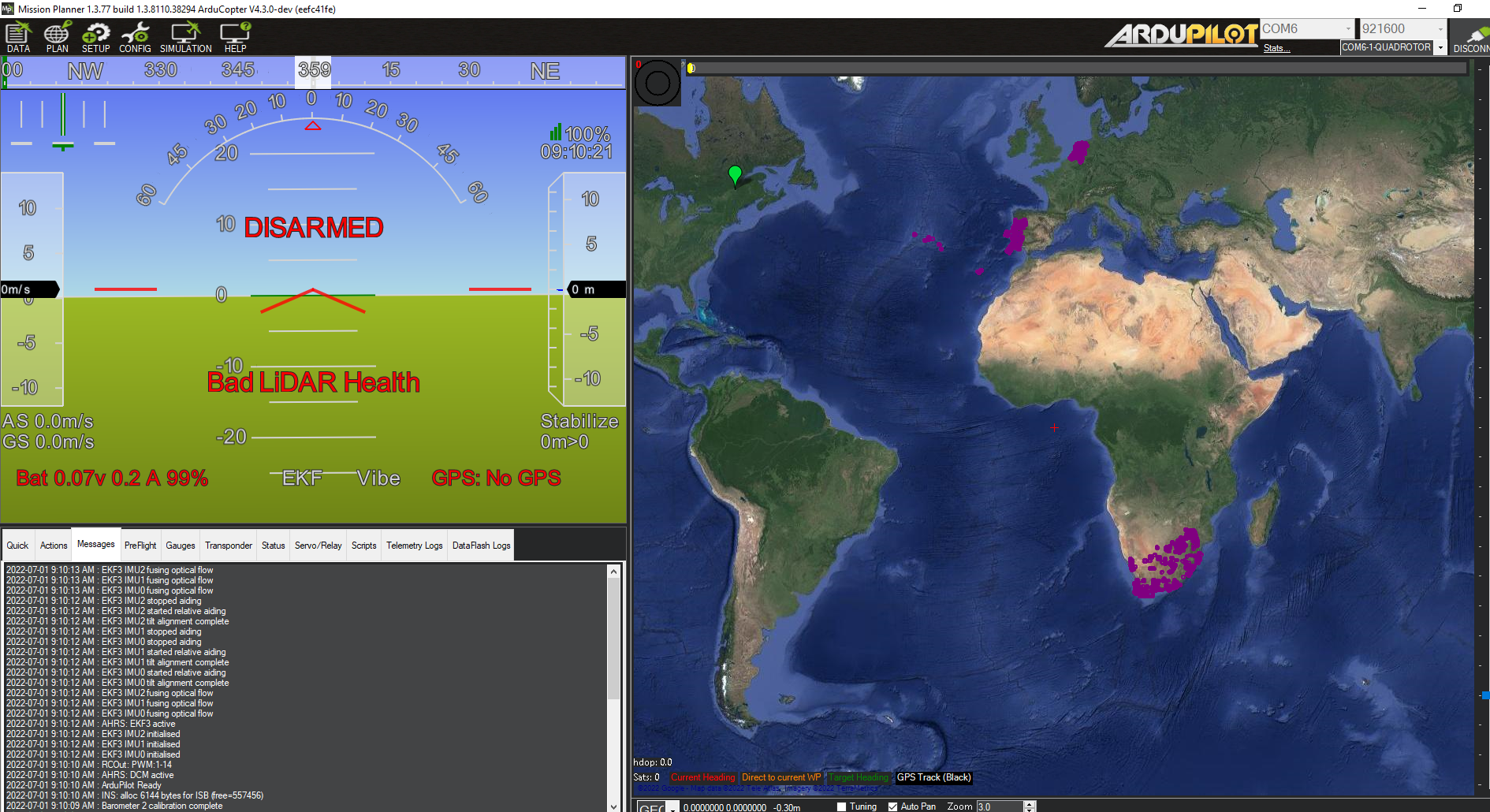
but unfortunately I experience an issue with the OF Fusion ( the bad lidar is the Cygbot device that is not powered)
I tried loading this binary = 80-0.1.ffb00970.uavcan.bin but still same issue. @AlexKlimaj are you using the modified KLT version for ArduPilot ? https://github.com/priseborough/px4flow/tree/klt_flow
I can upload log if anyone interested
@patrickpoirier51 to change the node ID, you need to adjust the CANNODE_NODE_ID parameter on the ARK Flow.
I am not using the modified KTL version. The ARK Flow runs PX4.
Here is the board config. https://github.com/PX4/PX4-Autopilot/tree/main/boards/ark/can-flow
Here is the optical flow sensor driver. This publishes the raw optical flow readings. https://github.com/PX4/PX4-Autopilot/tree/main/src/drivers/optical_flow/paw3902
The vehicle optical flow module in sensors consumes the raw optical flow data and syncs it with the gyro reading. That gets published to vehicle_optical_flow. https://github.com/PX4/PX4-Autopilot/tree/main/src/modules/sensors/vehicle_optical_flow
Finally, the uavcannode publishes vehicle_optical_flow to the dronecan flow_measurement message. https://github.com/PX4/PX4-Autopilot/blob/main/src/drivers/uavcannode/Publishers/FlowMeasurement.hpp
to change the node ID, you need to adjust the CANNODE_NODE_ID parameter on the ARK Flow. If you look above on the Reading on Mission Planner SLCAN there is no CANNODE_NODE_ID parameter As you can see there is only: CANNODE_GPS_RTCM,0 CANNODE_TERM,0
I doublecheck with the DroneCAN GUI , no change.
As for the flow reading, it is fused within EKF as a KLT type decode so I wonder how @mcelhennyi is using it
to change the node ID, you need to adjust the CANNODE_NODE_ID parameter on the ARK Flow. If you look above on the Reading on Mission Planner SLCAN there is no CANNODE_NODE_ID parameter As you can see there is only: CANNODE_GPS_RTCM,0 CANNODE_TERM,0
I doublecheck with the DroneCAN GUI , no change.
As for the flow reading, it is fused within EKF as a KLT type decode so I wonder how @mcelhennyi is using it
We configured it as you did I believe, and after flashing the new firmware (80-0.1.db238486 - which is not the master version I think, just before that) it just worked.... Let me get my hardware guy to verify our configs are similar.
Are you only having issues with the lidar? We had that working even before the flow upgrades I think.
That<s OK , I found the issue, I was not using the Compass in the EKF (because of another config...) , thanks, so far so good Next I will test outdoor at some altitude
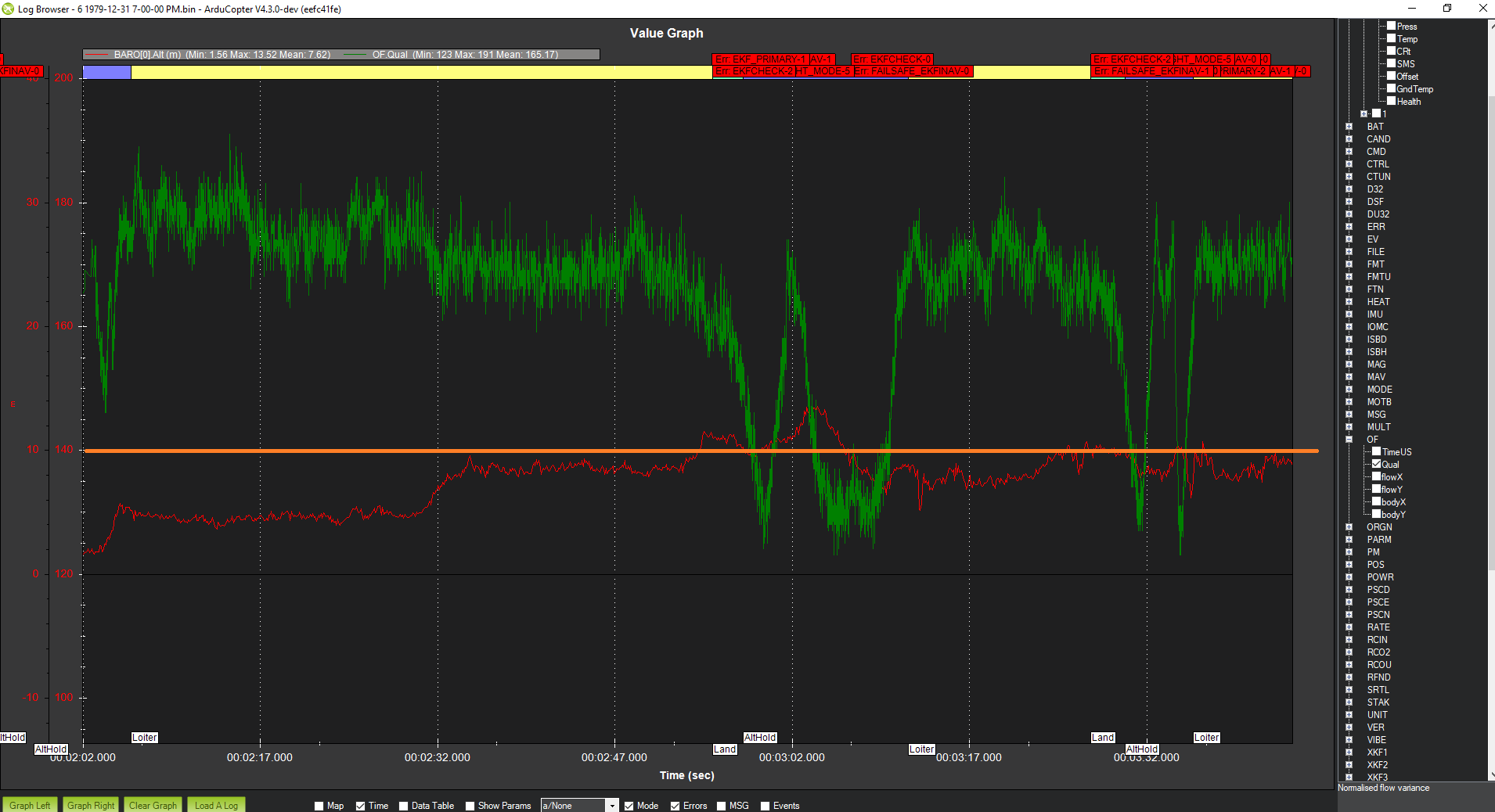
Here are the result of the outdoor test over a long grass and medium wind (10-20 km/h)
First the rangefinder distance measurement (configured to 30M) , I would say that the practical limit outdoor is 20M:

Then the OF measurement, this is a window showing that EKF reject measurement when less than 140/255 that roughly correspond to 10meter in this test situation
I think one of our devs is verifying compatibility with AP...waiting for feedback from him....do you intend to add AP compatibility to your product description on your web page, once its verified? thanks
@Hwurzburg I have completed test == OK
@AlexKlimaj cant merge this...there is no common page common-arkflow.rst describing the device and its setup
A page similar to https://ardupilot.org/plane/docs/common-hereflow.html. It's very similar except for a different distance on the range finder. Also it's px4 parameters on the node, but that's going to be normal as more nodes come to market. I'll do that in conjunction with the Ark CANnode. Just have to wait for my cube orange to make it back to my desk after testing.
A page similar to https://ardupilot.org/plane/docs/common-hereflow.html. It's very similar except for a different distance on the range finder. Also it's px4 parameters on the node, but that's going to be normal as more nodes come to market. I'll do that in conjunction with the Ark CANnode. Just have to wait for my cube orange to make it back to my desk after testing.
Thanks, I have added an ARK Flow page.
@patrickpoirier51 @AlexKlimaj is this ready for merge? several open unresolved comments
Note, I'm not good at checking this notifications screen. I should be better - but if you really want a response, direct email is better.
@AlexKlimaj I thought I'd push this support along a bit by updating the firmware and verifying receipt of the gyro data on the device (which I believe is a feature in the updated firmware).
I've tried two firmwares, the oldest I could find (https://github.com/PX4/PX4-Autopilot/releases/tag/v1.12.0-beta5) and the newest firmware I could find (https://github.com/PX4/PX4-Autopilot/releases/tag/v1.13.1).
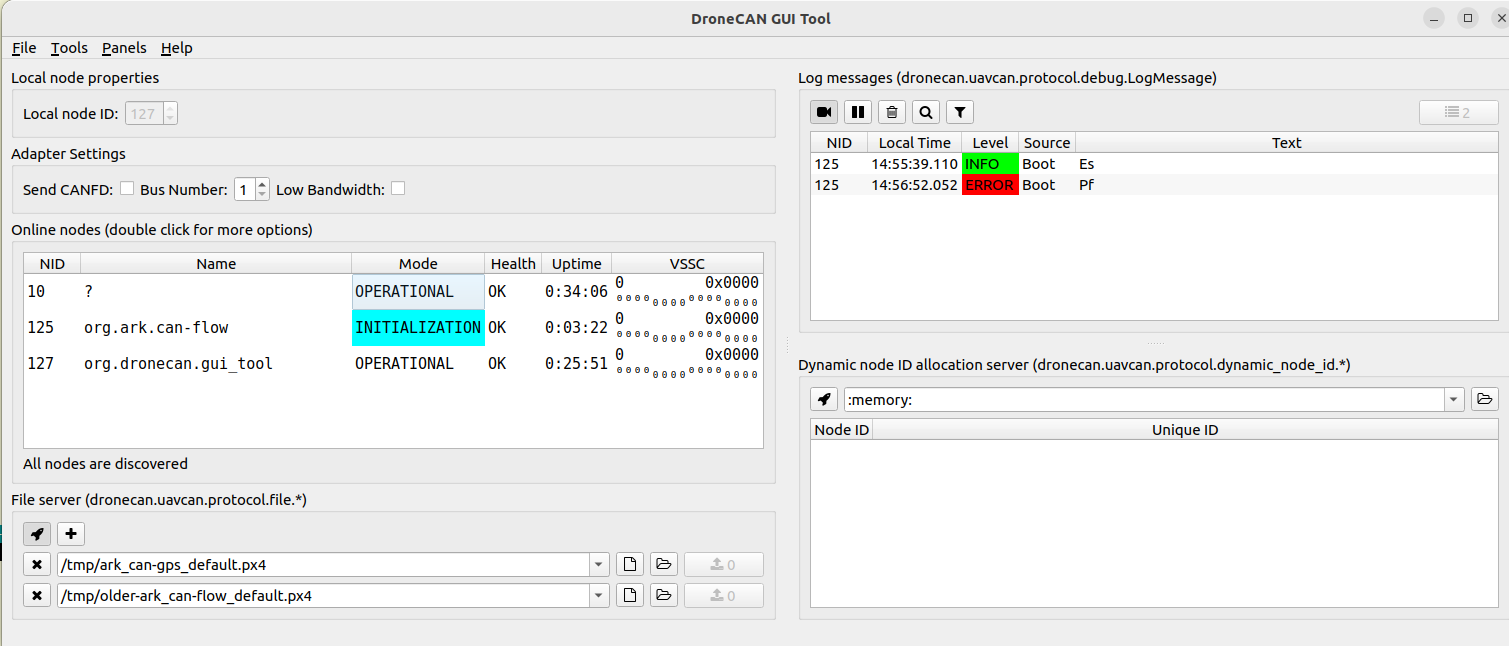
Bootloader seems to work just fine when uploading ark_can-flow_default.px4, but the device briefly enters a "critical" state and then stays in the INITIALIZATION state. It's node 125 in the following:
It *was running a version represented as 1.7/ffff in the Software Version/CRC64 field - and it was working fine there apart from the missing data.
Suggestions?
@peterbarker Thanks for following up on this. The .px4 files are not the correct firmware files for flashing the px4 cannodes. You need to use the 80-0.1.xxxxxxxx.uavcan.bin where xxxxxx is the git hash. See attached binary.
80-0.1.c5dc1221.uavcan.bin.zip
@peterbarker Thanks for following up on this. The .px4 files are not the correct firmware files for flashing the px4 cannodes. You need to use the 80-0.1.xxxxxxxx.uavcan.bin where xxxxxx is the git hash. See attached binary.
Ah! Much better, thanks!
Not only do I have a node that's not stuck in INITIALISING, but I'm now getting rate_gyro_integral field values, which is what it was missing.
I'm sure this isn't the only device out there that would benefit from this improved firmware - do you have a perma-link to it? We can potentially put it up on firmware.ardupilot.orgif you don't have a download site for it. In any case, a link in this PR to the firmware would be a good idea IMO.
@peterbarker Great! I just posted the ARK Flow binary in the PX4 1.13.2 release.
https://github.com/PX4/PX4-Autopilot/releases/tag/v1.13.2
https://github.com/PX4/PX4-Autopilot/releases/download/v1.13.2/ark_can-flow_default.zip
@AlexKlimaj Alex where do we stand on this....seems a few unresolved comments....but would like to merge if you are shipping these
@AlexKlimaj Alex where do we stand on this....seems a few unresolved comments....but would like to merge if you are shipping these
@Hwurzburg I took care of the last comment and rebased into a single commit.