ardupilot
 ardupilot copied to clipboard
ardupilot copied to clipboard
Copter: Use altitude in land & payload place auto mode mission commands
Currently, when a Land or Payload Place command is given within mode auto, Copter flies to the longitude, latitude at the present height. The alt field is not used. I think it's a good feature to include the altitude as well. This is also in response to #13500
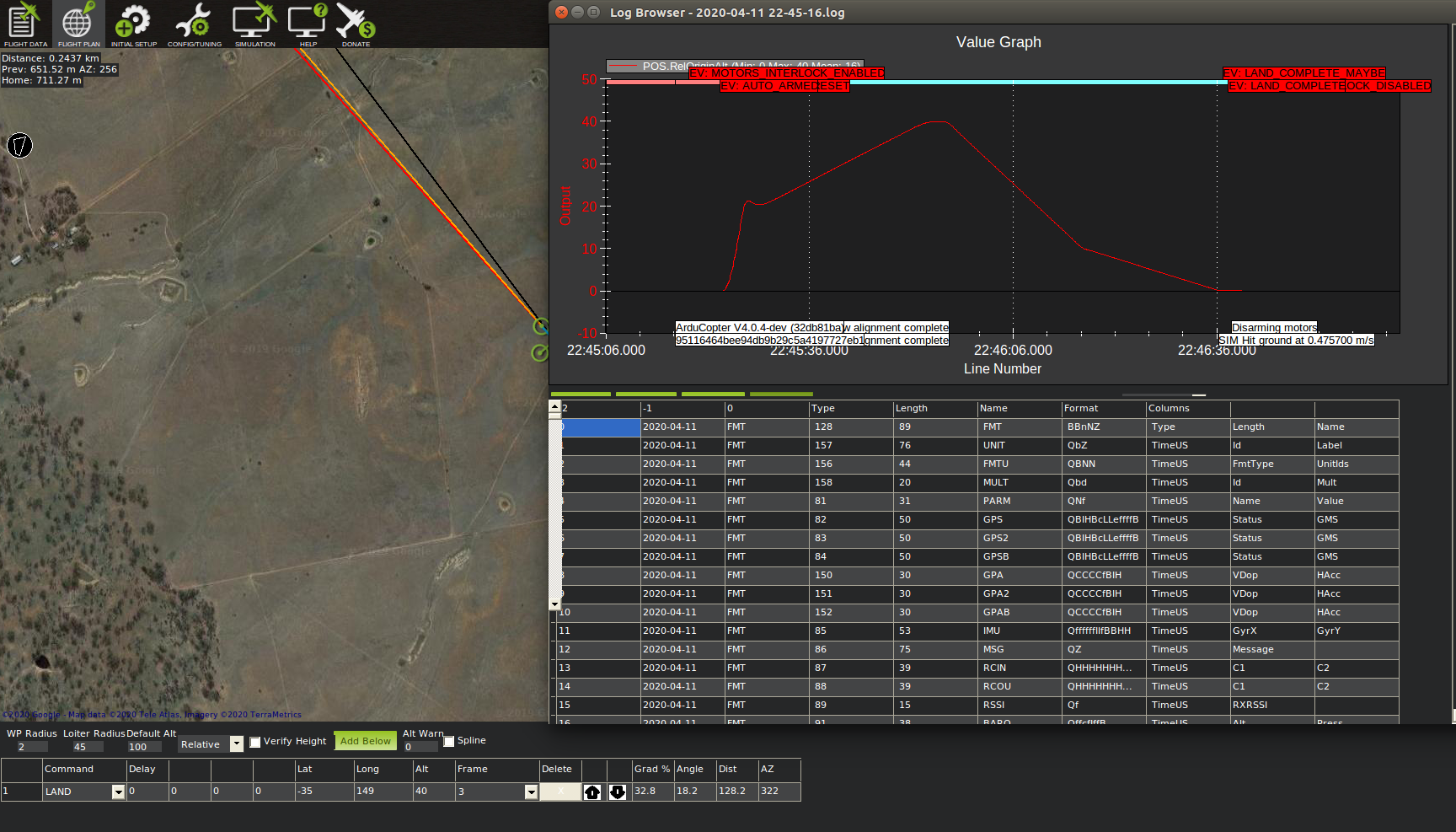
Testing: Tested in SITL with both terrain-following on and off. Works well. Here is an example, where Land command (with Alt field set to 40) was initiated at 20 meters:
Fixes #13500
@khancyr thanks for the review! I was not aware of the helper function, now I have fixed the PR to use it. Please tell me if any other changes are required.
May I ask if this will invoke LAND_SPEED at 10m above the commanded LAND altitude, instead of what it currently does using home elevation as the reference elevation? I ask because I am testing cargo carrying using both slung-cargo package place mode or landing drop-off at an elevation that differs from the home elevation by 30m, so the landing approach profile has been troublesome. I've had to set WPNAV_SPEED_DN at 100cm/s as a compromise, but unfortunately ALL descents are at this speed, including a very long, slow descent 80m back to home elevation. I'd be glad to help test anything you work out. Welcome to email me if you like [email protected] . Thanks, and greetings from Virginia, USA.
@FPVAdventure this type of specific enhancement I believe is out of scope for this PR. I think you should raise a new feature request in the issues section. I believe the best solution for you would be to script your requirements perhaps?
Thank you for your response. I am not a developer, but was just curious to know the intended behavior of your pull request, as I believe it may have useful applications to my use case. Essentially it is delivery of packages to destination of different elevation, but while retaining the descent speed followed by landing speed profile that is present in the default mission where the landing is at Home. In any case, thank you for working on AC!
@IamPete1 all PR's from 1.5 years back was when I was experimenting withArduPilot and was solving "Good first issues". At the time I didn't know how to mark it for dev call and then a few months later they were forgotten :/
Looks like we forgot about this one.
@lthall might be interested in this.